eJournal: uffmm.org
ISSN 2567-6458, 19.August 2022 – 19 August 2022
Email: info@uffmm.org
Author: Gerd Doeben-Henisch
Email: gerd@doeben-henisch.de
CONTEXT
This text is part of the subject COMMON SCIENCE as Sustainable Applied Empirical Theory, besides ENGINEERING, in a SOCIETY. It is a preliminary version, which is intended to become part of a book.
True – False – Undefined
Talking about ‘butter’ on ‘tables’ during a ‘breakfast’ will usually stimulate lots of ‘imaginations’ in the head of the hearer of such utterances. Because an abstract word can trigger many different ‘concrete things’ these individual imaginations can vary a lot. If different hearers would start to ‘paint’ those imaginations on some paper it could happen, that nearly no two paintings would ‘match’ with all details. The ‘space of possible meanings’ of an abstract word (‘butter’, ‘table’, ‘breakfast’, ‘kitchen’, …) is in principle ‘infinite’. And the manifested ‘diversity’ of the details reveals a kind of ‘fuzziness’ which at a first glance seems to be ‘infeasible’ in the practice of language communication.
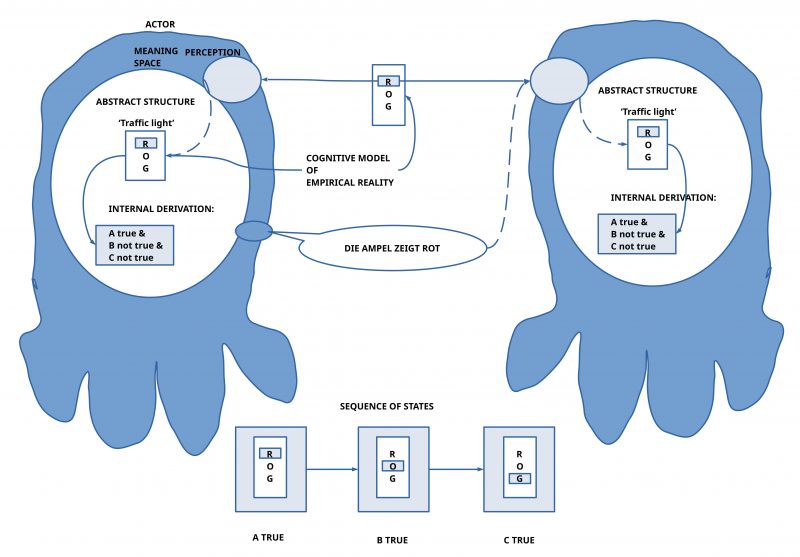
This appearing diversity, fuzziness in the examples points to some ‘internal mechanism’ in our brains which works in complete ‘silence’, always ‘automatically’, completely ‘unconscious’, which ‘arranges’ the many different perceptions in a way, which selects some finite set of properties out of the many perceived properties and makes such a ‘selection’ to a kind of ‘signature’, ‘address’, which starts to play the ‘role’ of an individual representation for all those possible sets of perceived properties in the future, which are ‘sufficiently well’ ‘similar’ to those ‘signature properties’. The ‘boundaries’ are not sharp; the boundaries can vary; there can grow large ‘clusters of different property sets’ intersecting with this ‘signature set’ but are different otherwise. Thus, there exists a growing meaning structure in our brains which creates a ‘meaning space’, whose elements can be associated in arbitrary many ways.
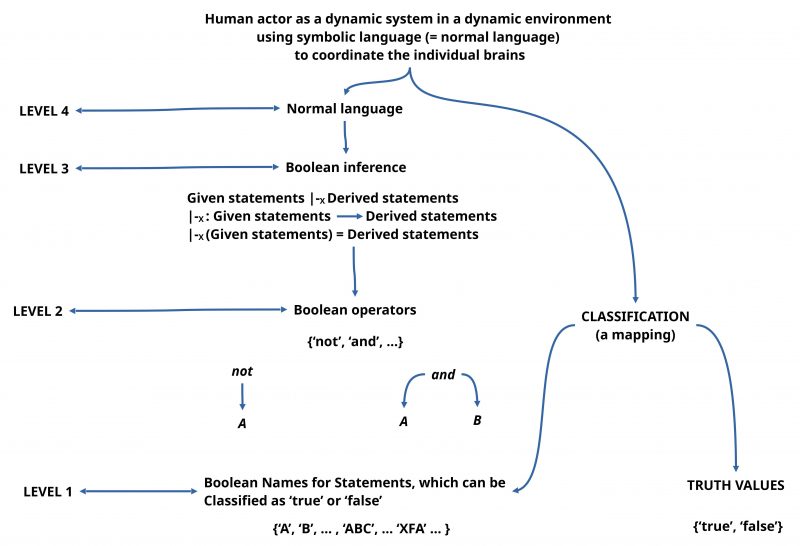
If my friend Bill starts talking with me by asking whether there already is some butter on the table, than his utterance — a question — will trigger in me a subset of possible meanings of butter which are in my memory available. Then, when I am looking to the table in the kitchen, I will ‘scan’ the table whether there is something concrete which will ‘match’ these activated internal meanings. Either there happens a direct match or there is something, which looks like something, which feeds back through my perception and urging my memory to ‘look for something alike’. If this happens, then there will be a match too. Thus if such an internal match between ‘perceived properties’ and ‘remembered properties’ will happen then I would shout to Bill “Yes, there is already some butter on the table”. If no such match would happen, then I would shout back “No, there is not yet butter on the table”. In the first case we are used to classify a statement as ‘true’, if the abstract meaning matches a concrete perception sufficiently well; otherwise not. If Mary standing nearby the table would have said before “No, there is no butter on the table” while Jeremy has stated that there is some butter, then these two statements would ‘contradict’ each other. If Jeremy and Mary can come to a common opinion by observable evidence that there is some butter on the table or not, they would be able to ‘agree’ to the positive, affirmative statement that there is some butter on the table, otherwise not. To classify a statement as being ‘false’ would presuppose that the contradicting format of this statement is classified as being ‘true’. If the human actors can not come to a sufficient agreement whether either the statement “Yes, there is already some butter on the table” is true or “No, there is no butter on the table”, then both statements are ‘undecidable’ by the human actors with regard to some observable evidence. In that case these statements are with regard to being ‘true’ or ‘false’ ‘undefined’.[*5]
This everyday situation offers some more variants. If for instance Bill is asking Jeremy whether there is some butter on the table it could happen either that Jeremy says ‘no’ because his ‘understanding’ of the word ‘butter’ consist of kinds of meaning which are not matching that concrete thing on the table, which Bill would understand as ‘butter’. Such a ‘misunderstanding’ can happen easily if people from different cultures are coming together. Thus, having some observable evidence does not guarantee the right classification within a certain language if the language users have learned ‘different meanings in their memory’. In the other case, if Mary has a bad visual perception on account of some ‘visual handicap’ but has in principle the same meaning space like Bill, then it can happen too that she would deny that there is some butter on the table because her visual perceptions are ‘disturbed by their visual handicap’ in a way that the perceptional key to her memory is not in that format which has to match their remembered language induced meaning.
Thus, in this simple example of a ‘true’ statement there are already several ‘factors’ needed to make a ‘true statement’: (i) a perception which works ‘normal’; (ii) a language meaning which is ‘sufficiently common’; (iii) a ‘successful match’ between an actual observation and the triggered memory based meaning. Every factor (i) – (iii) is not simple, can vary a lot. And there exists even more factors which can influence the final classification of being ‘true’ or not; in cases of ‘contradicting statements’ all these different factors can be involved.
In our times of ‘growing fake news’ we can experience, that the agreement between different human persons about the ‘truth’ of a statement can in practice be very difficult or even seems to appear impossible. This points to one more factor which is finally decisive: whatever we perceive and remember, these processes are ’embedded’ in some larger ‘conceptual frameworks‘, which are further ’embedded’ in a system of preferences’ which can be ‘decisive’ for the ‘handling’ of our opinions. Human persons having certain ‘convictions’ related to political or religious or ethical opinions can be ‘driven’ by these convictions in a way, which ‘overrides’ empirical evidences because their ‘conceptual frameworks’ ‘interpret’ these perceptions in a different way. Modern scientific observations are meanwhile often in a format, which only experts can interpret adequately related to a ‘theoretical conceptual framework’. If a non-expert does ‘not trust’ in this scientific interpretation he can ‘switch’ to a different conceptual framework in which he is trusting more, although this other concepOrdinary Language Inference: Preserving and Creating Truthtual framework contradicts the scientific framework, and thus he can assume ‘facts’ which are contradicting those ‘facts’ classified as scientific. Scientists can classify these other facts as ‘fake news’, but this will have no effect on the believer of the fake news. The fake-news believer thinks he is ‘right’ because it matches his individual framework shared by others in social groups.
From this follows that the classification of a statement as being ‘true’ is a complex matter depending from many factors which have to be ‘synchronized’ to come to an agreement. Especially it reveals that ’empirical (observational) evidence’ is not necessarily an automatism: it presupposes appropriate meaning spaces embedded in sets of preferences, which are ‘observation friendly’.
— draft version —