TRANSLATION: The following text is a translation from a German version into English. For the translation I am using the software @chatGPT4o with manual modifications.
This is another interim reflection aimed at further clarifying the structural terminology of ‘intelligence’ and ‘learning.’ This and the preceding interim reflections are intended as a ‘supplement’ to the main thread of the text project What is Life?
The initial analysis of the concept of intelligence made it clear that, within the framework of an intelligence test, only those responses can be given by the test subject that are currently available to them. Apart from innate reflexes and physically conditioned properties, these responses stem from internal structures that have emerged through learning processes. The structures acquired through learning will here be referred to as knowledge or experience.
The distinction between the terms intelligence, learning, knowledge, and experience will be further elaborated in the following text. This will reveal a general structure of Homo sapiens (HS) as part of the overarching Life (L), equipped with the capacity to potentially secure its survival on this planet (P). However, as a part of life, Homo sapiens can also use its abilities to contribute to the survival of all life, which ultimately ensures its own existence. Aside from an unpredictable future, Homo sapiens remains entirely dependent on the totality of life on this planet.
IMAGE 1: Basic constellation of Planet (P), Life (L), and Homo sapiens (HS) as a subpopulation of Life. All components (P, L, HS) interact both within themselves and with one another.
INTELLIGENCE – LEARNING – KNOWLEDGE – MATERIAL CONDITIONS
Starting Point
The starting point of the further considerations is illustrated in the following diagram:
IMAGE 2: A dynamic perspective of the Planet-Life-Homo sapiens constellation, assuming a fictional observer.
From the perspective of a fictional observer (see IMAGE 2), the structure of the Planet – Life – Homo sapiens (PLHS) constellation, with its extensive interactions, can be seen as embedded within a temporal structure (T), which is understood here as a process with time slices (see Text No. 4).
In the diagram, there is a fixed reference point, the present (NOW). Before the present, there is a presumed history (HISTORY), and after the present, in the potentially emerging new presents (POSSIBLE FUTURES), further instances of the present may arise. However, at the current moment, in the present, these future instances are not yet known.
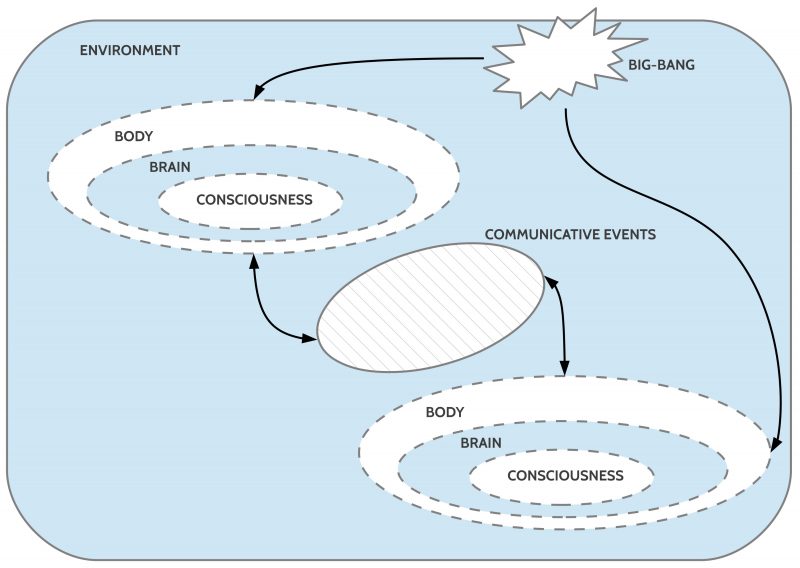
IMAGE 3: Assuming the presence of a brain that, through a body, can perceive properties of the world, later remember them, and subsequently organize them in an appropriate way, a certain dynamic structure of Planet, Life, and Homo sapiens becomes recognizable.
The fictional observer, however, exists only in the mind of a human being—provided that they can think, that they can remember, and that their memory has been shaped by actual perceptions. Since perception, memory, and thinking are all prone to error, the perspective of the fictional observer is always either more correct or more incorrect.
Knowledge and Material Embedding
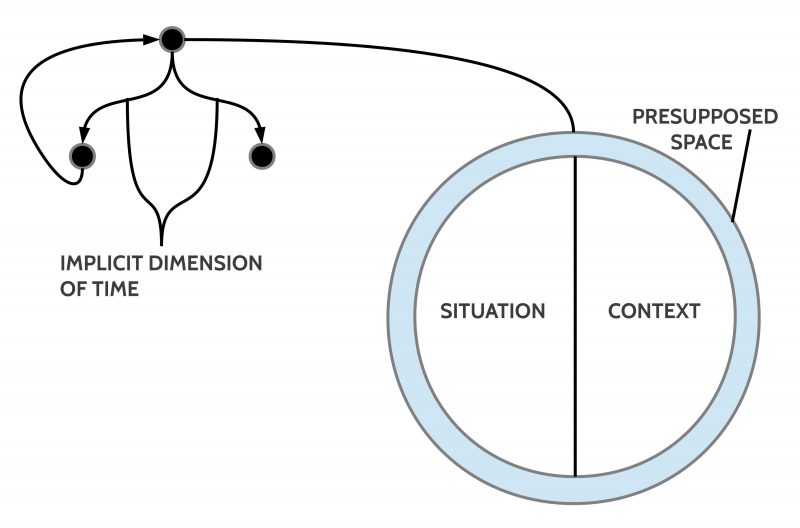
The thinking human is equipped with a body (Material Embedding 1) that is always situated in a real situation—or a real state (Material Embedding 2). This situation is always part of something larger. Here, we assume that this larger context is normally Planet Earth (which itself is embedded in almost arbitrarily vast contexts within the universe), along with the population of Homo sapiens and the totality of life (Material Embedding 3).
Over time, humans have discovered that, in the present situation, numerous traces (TRACES) can be found—traces that point to events related to the planet, events of life on the planet, and events of Homo sapiens as part of life on the planet.
These observable traces (observable TRACES) originate from different time periods in history and thus reveal patterns of change (CH). If changes exhibit regularities, they can serve as a basis for generating possible future states (POSSIBLE FUTURES) through a form of prediction logic.
Knowledge
For the human perspective on the planet, life, and itself, the decisive factor is that humans possess the following abilities: (i) Perceive everything around them in a way that allows them to (ii) Store the contents of perception so that they can (iii) Recall these contents later.
(iv) As we now understand, perception does not occur as a one-to-one representation but involves various simplifications/abstractions that allow a connection to current perception during recall.
(v) Due to the nature of stored content, (vi) Thinking can structure these contents in different ways and (vii) detect changes by comparing before and after.
If these changes exhibit sufficient regularity, (viii) thinking can generate limited predictions.
(ix) The process of generating predictions falls broadly under the concept of logic or logical inference (although modern formal logic captures only partial aspects of this real phenomenon).
One could formulate this idea as follows: Knowledge is a specific form of “resonance” of the material conditions under which knowledge emerges.
While material conditions can influence the emergence and structure of knowledge, they cannot:
Generate knowledge itself, nor
Generate solely from within themselvesthat which knowledge reflects.
Thus, the resonance in the format of knowledge points to something beyond knowledge itself.
In traditional philosophical language, this would be referred to as transcendence: with the availability of knowledge—arising through a true resonance—knowledge transcends (exceeds) the human being and their material limitations.
Material Embedding of Knowledge
Today, we understand that the material embedding of knowledge reveals numerous factors that can be either constructive or destructive in the process of knowledge formation, as well as in its failure to emerge.
The effects of these factors become particularly evident when people suffer from illnesses that weaken and torment them, possibly confining them to a specific place. The lack of water, food, or the absence of proper shelter to protect against cold, heat, and rain also plays a critical role. There is the threat posed by other humans or other life forms (animals, insects, plants, etc.). Emotions such as fear, hatred, intense agitation, or strong emotional dependencies can also interfere. Sensory impairments—in vision, hearing, smell, etc.—can further complicate knowledge formation. Poor communication due to language barriers, social exclusion, persecution, or being on the run because of natural disasters can also hinder this process—and much more.
Even one’s own body and existing knowledge can turn into obstacles: A person who holds specific knowledge at a given moment may be emotionally resistant to changing that knowledge. In such cases, their current understanding of the world and themselves freezes—it becomes rigid, and the dynamic nature of life dissipates. The life in their mind turns to stone.
Knowledge and Society; AI
If we recognize how complex and fragile the formation of knowledge is within the mind of a single person, we might begin to grasp the enormous challenge of enabling an entire population to jointly generate the knowledge necessary for securing a good survival in a possible future.
Since at least 2022, technical tools marketed under the misleading label of Artificial Intelligence (AI) have become available. These tools may indeed serve as a tremendous aid—provided that humanity cultivates its own knowledge accordingly (with AI as part of it).
However, as long as humans do not manage to properly integrate the material embedding of their knowledge, so too will so-called AI remain stagnant. The material embedding of humans is not merely a potential obstacle; it is simultaneously the enabler of world-relevant and life-relevant knowledge.
AI does not and cannot possess these two dimensions—not only today but fundamentally. Biological systems embody a potential that can truly transcend inanimate matter and transform it into something new.
Machines—designed, built, and programmed by humans—are, compared to biological systems, merely very simple tools. However, through symbiosis with biological systems, they may generate effects far beyond what we can currently imagine.
TRANSLATION: The following text is a translation from a German version into English. For the translation I am using the software @chatGPT4o with manual modifications.
This is another intermediate reflection to structurally clarify the concepts of ‘intelligence’ and ‘learning’. This is an analytical proposal. This and the preceding intermediate reflection are intended as a ‘supplement’ to the main thread of the text project ‘What is Life?’
In the last insert titled “INSERTION: A Brief History of the Concept of Intelligence and Its Future” a short historical overview illustrated that (i) the concept of ‘intelligence’ has undergone significant change since antiquity and remains notably ‘under defined’ to this day. Additionally, since the fall of 2022, (ii) there has been a surge in the use of a new type of technical (non-biological) intelligence, whose relationship to biological intelligence remains entirely unresolved. One key reason for this is that the concept of ‘biological intelligence’—aside from a few isolated attempts at clarification—remains largely undefined. Furthermore, (iii) in light of the new ‘dynamic perspective on life’ on this planet, there is growing evidence that currently known forms of non-biological (technical) intelligence cannot in any way replace essential properties of biological intelligence. This follows directly from the fundamental structure of biological systems, even without considering many details. As an initial outline for a more precise definition of the concept of ‘biological intelligence,’ (iv) it becomes apparent that biological intelligence is not a fixed entity but rather an emergent property of a process, allowing for continuous evolution—individually, collectively, and technologically.
Note: The term process is understood here in the sense of Text No. 4 (see the list above): If one breaks down the temporal course of an event (e.g., everyday life) into segments (time slices) and considers all the changes that occur from one segment to the next, one can also say that a successor segment emerges from a predecessor segment precisely through these changes. As long as an event can be described in this way as a sequence of segments (time slices) governed by changes, it shall be understood here as a process. The property of a process can then not be described in isolation but only as a momentary property within an ongoing change, which is in flux and has neither an absolute beginning nor an absolute end. Furthermore, many changes can occur simultaneously and may influence each other in multiple ways.
As the term ‘biological intelligence’ already suggests, the rather undefined concept of ‘intelligence’ is considered here in the context of life.
In previous reflections, ‘life’ has appeared as a ‘dynamic phenomenon’ whose processual progression can be approximately described using ‘time slices’ (see Text No. 4).
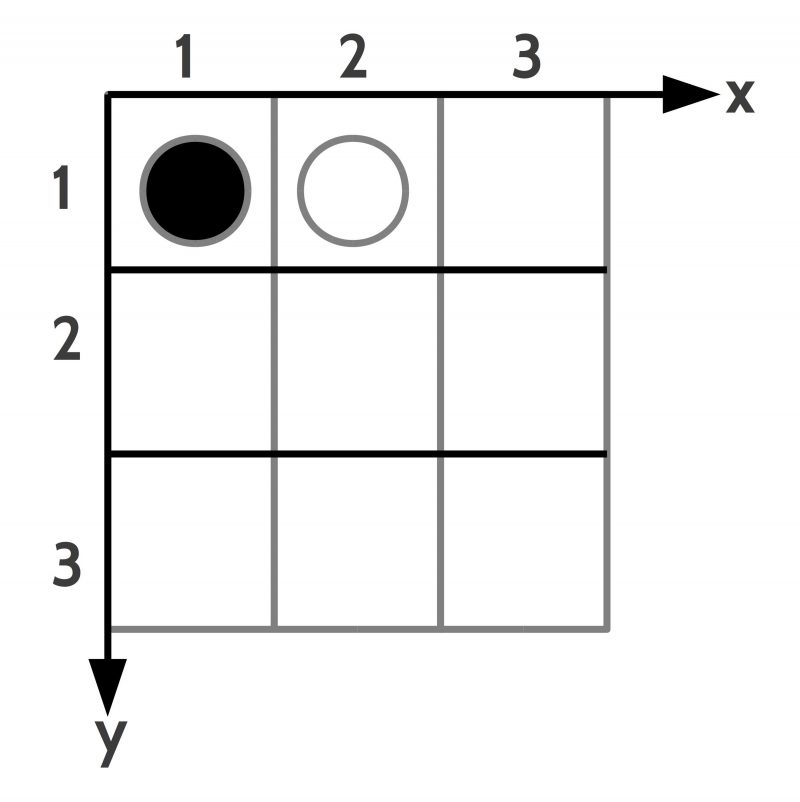
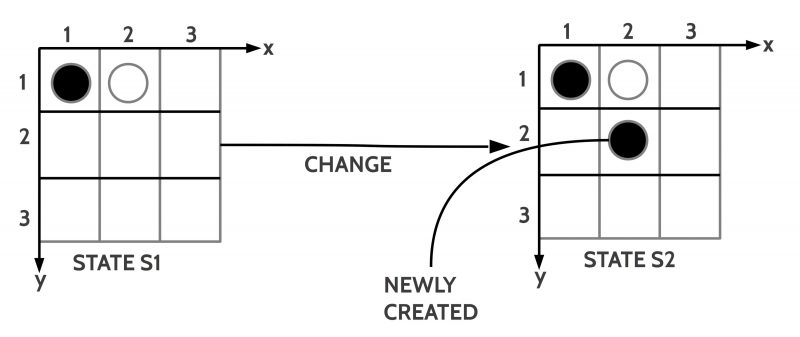
In a ‘psychological perspective,’ individual manifestations of life in the form of ‘distinguishable living beings’ are attributed the ‘property of intelligence’ when a single living being in a given time slice Z1 is required to ‘solve a task’ and, after a finite number of further time slices, has indeed ‘changed the state of time slice Z1’ to the extent that a ‘new state’ has emerged, which is part of the then-current time slice. ‘Judges’ then determine whether this new state is ‘correct’ or ‘not correct.’ (Note: A ‘state’ is the totality of distinguishable phenomena that can be observed within a time slice.)
For example, if the task were “How do you complete the text ‘3+4=’?”, then in certain cultural contexts, the transformation of ‘3+4=’ into ‘3+4=7’ would be considered a ‘correct solution.’ Any deviation from this would be ‘incorrect.’ However, it is easy to imagine other cultural systems where the solution ‘3+4=7’ would not be correct, and instead, ‘3+4=13’ would be.
Even this simple example demonstrates that the question of the ‘correctness’ of a formulation presupposes that the participants operate within a ‘cognitive framework’ that defines what is ‘allowed’ and what is not. If, as in the example ‘3+4=7,’ we assume a decimal number system with the digits [0,…,9], then the answer is ‘correct.’ However, if we assume instead a quaternary (base-4) system with the digits [0,…,3], then ‘3+4=7’ cannot be correct because the digit ‘7’ does not exist in a base-4 system. Any sum exceeding ‘3’ would lead to a ‘positional shift’: ‘3+1=10, 3+2=11, 3+3=12, 3+4=13, …’
At this point, we could therefore formulate: To test for the presence of the property of ‘intelligence’ in a biological system, a ‘task’ is set, and we observe whether the biological system, in ‘response to the task,’ generates a ‘new situation’ that includes elements recognized as a ‘correct solution.’ A simple form of ‘correctness assessment’ could involve a direct comparison to verify correctness. For situations that are ‘more complex’ because they require ‘knowledge and experience’ that cannot be assumed to be present in all participants, the role of a ‘judge’ becomes necessary. This judge is someone whom all assume to be capable—based on their knowledge and experience—of determining whether a ‘new situation, within the assumed framework,’ should be classified as ‘correct’ or ‘not correct.’
Intelligence Needs Learning
The simple example above already illustrates that it makes sense to distinguish between the ‘property of intelligence’ as something ‘available’ and the ‘acquisition of intelligence.’ If one knows the ‘framework’ that defines and regulates how certain numerical symbols are used, then responding correctly to a ‘task’ is easy. However, if one does not yet know this framework, responding is impossible!
Learning Requires a Brain
In the case of ‘biological agents’ of the type Homo sapiens, we know that the foundation of behavior is the ‘brain.’ Although this ‘brain’ possesses a wide range of ‘automatic knowledge’ from birth, an individual agent must ‘learn’ nearly all details in order to navigate the highly dynamic environment (including their own body) effectively. It is precisely these ‘learning processes’ that equip the brain for various tasks, enabling it to produce the ‘required response’ at the decisive moment when a task demands it.
The ‘Miracle’ of Intelligence
The ‘miracle of intelligence’ lies not so much in the fact that a specific ‘agent’ provides the ‘expected correct answer’ to a given task, but rather in the brain’s ability to internally construct appropriate ‘structures’ and ‘transformation rules’ in response to a dynamic environment (including its own body!). These internal models provide the ‘clues’ needed to generate behavior that is considered ‘adequate’ or ‘correct’ in a given situation.
Even though we now understand that the ‘material composition of the brain’ can affect the speed and precision of ‘learning processes,’ this is not a fundamental obstacle to learning in general. Moreover, it has been observed that humans develop highly diverse ‘cognitive profiles’: some struggle with ‘languages’ but excel in ‘formal thinking’ or ‘abstract (not necessarily formal) reasoning,’ while others are particularly skilled in ‘visual and auditory processing,’ ‘physical coordination,’ and much more. Additionally, a wide range of ‘emotions’ plays a crucial role in the success of learning processes.
The key takeaway is that any form of ‘acquired’ intelligence—understood as the ability to respond appropriately to situational properties—is not available without learning.
Learning as an ‘Educational Process’ (for Intelligence and Beyond)
Looking back at the first reliable intelligence test [1] by Alfred Binet (1857–1911) and Théodore Simon (1873–1961), the ‘context’ of their efforts was clear: measuring ‘intelligence’ was not about capturing something ‘fixed or static’ but rather about assessing the ‘current states of knowledge and experience’ of students—states that could change! The tests were intended solely to help students ‘where they still had gaps.’
However, Binet and Simon’s awareness of the ‘dynamic nature of intelligence’ was gradually overshadowed by researchers like William Stern (1871–1938), Lewis M. Terman (1877–1956), and David W. Wechsler (1896–1981), who shifted the focus toward viewing intelligence as a ‘fixed structure’ that could be measured and used to ‘classify people.’ This perspective aligned with the prevailing tendency in educational systems to treat ‘assumed intelligence’ as something ‘given’ rather than fostering the ‘potential intelligence’ of individuals.
This development has taken on almost ‘tragic dimensions’: Schools increasingly ‘train’ children for tests instead of fostering their cognitive development. The natural curiosity and creative intelligence of children are often stifled as a result. This creates a kind of ‘negative feedback loop’: Teachers teach what is tested, students learn what is rewarded—true learning fades into the background.
[2] A very striking analysis of this topic can be found in the book The Mismeasure of Man by Stephen Jay Gould in the revised and expanded edition of 1996.
Learning, Society, and Goals
If we assume that ‘intelligence’ is generally a product of ‘learning processes’ (though the nature of individual bodies and brains influences these processes), and if learning does not occur in a ‘vacuum’ but within the concrete context of ‘everyday life,’ which is part of a specific ‘society,’ then every learning process will inevitably be ‘shaped’ by the available context.
For a society as a whole, its ‘survival’ may depend on whether ‘future generations’ acquire precisely the skills needed in a given phase of life.
Looking at what different societies do for their educational processes—and how they do it—one must seriously question whether these societies truly possess a ‘will to live’—not just on an individual level, but as a thriving collective.
A localization of philosophy within the overall context:
Author: Gerd Doeben-Henisch
Changelog: Jan 21, 2025 – Jan 28, 20225
AUTHOR: I have changed the title “WHAT IS LIFE? … PHILOSOPHY OF THE WORLD” to “WHAT IS LIFE? … PHILOSOPHY OF LIFE.” Reason: It will become evident in the course of the investigation that the ‘life’ we find on planet Earth, and which at first glance appears to be a ‘part of the world and the universe,’ may not actually be only a ‘part’ … Therefore a ‘philosophy’ aiming to describe the ‘world’ would do better to focus directly on ‘life,’ which is the true ‘riddle of the universe.’
Email: info@uffmm.org
TRANSLATION: The following text is a translation from a German version into English. For the translation I am using the software @chatGPT4o with manual modifications.
In the two preceding texts, the ‘framework’ was outlined within which the subsequent texts on the topic “What is life? What roles do we have? Is there a future?” will unfold.
The exploration of the various aspects of this broad theme begins with reflections on the role of ‘philosophy’ in this context.
ANCHORING ‘PHILOSOPHY’ IN LIFE
The assumption here is that the phenomenon of ‘philosophy’ is connected to ‘actors’ who live on this ‘planet,’ who are part of the great phenomenon of ‘life’ on this planet. According to a widely held understanding, philosophy is found primarily in the life form broadly referred to as ‘Homo’ (approximately 6 million years before our present time) and, within the Homo lineage, later manifested as ‘Homo sapiens’ (approximately 300,000 years before our present time). While other manifestations of the Homo life form existed alongside Homo sapiens, it is only Homo sapiens who have survived to this day—so essentially, ‘us.’
As is well known, in the year 2025, there are many ‘continents’ on the planet Earth where ‘humans’ live almost everywhere. The ways people live on different continents often differ significantly in outward appearances, influenced by external conditions (climate, vegetation, geology, worldviews, etc.). The ‘genetic basis’ is either almost ‘identical’ or differs only in ‘details.’ The connection between these details and observable ‘behavior’ remains largely unclear. While differences in hair color, skin color, body shape, etc., may exist, these differences are found on every continent, in every population group, and are irrelevant to behavior.
Due to numerous ‘necessities of life’ (food, drink, shelter, etc.), humans never act entirely ‘planlessly.’ From the earliest ‘evidence of human life,’ we can observe that humans ‘shape,’ ‘organize,’ and develop their behavior and environment into increasingly complex ‘systems of rules’ that guide their actions. The entirety of these forms, organizations, and systems of rules is referred to here as ‘culture.’
Within this ‘human culture,’ one feature stands out in particular: communication through ‘spoken language.’ While humans can ‘communicate’ in many ways without explicit speech, for all detailed, complex matters—especially for the purpose of ‘coordinating shared actions’—spoken language proves to be indispensable and immensely powerful! It is noteworthy that there was not just ‘one language,’ but almost as many languages as there were ‘human communities.’ The ‘harmonization of languages’ or the ‘fusion’ of different languages has—if at all—only occurred over many generations. Even today (2025), we see national communities with hundreds of languages coexisting, and it seems self-evident that at multinational events, each nation participates with at least one ‘own’ language.
As a culture becomes enriched with more and more ‘elements,’ the demands on the ‘members of this culture’ to ‘familiarize themselves’ with all these elements and their ‘interplay’ increase. Today, we would say that individual members must ‘learn’ their own culture.
In the last approximately 2,000 to 3,000 years of human culture, a ‘pattern of education’ has emerged that is broadly referred to as ‘philosophy,’ or specific behaviors are labeled as ‘philosophical.’ The diversity of this phenomenon ‘philosophy’ is so vast and pronounced that it seems nearly impossible to trace this diversity back to just a few fundamental elements. Those who wish to explore this historical diversity further can do so by consulting relevant handbooks and encyclopedias, where they may—possibly—’lose themselves’ in this diversity.
Here, a different approach is taken.
This ‘diversity of the philosophical’ ultimately always leads back to specific individuals—usually referred to as ‘philosophers’ in an educational sense—who were actors in a particular, culturally shaped ‘everyday life.’ As ‘parts’ of such a ‘life process,’ they formed certain ‘opinions,’ ‘views of life.’ They used ‘specific linguistic expressions,’ interpreted, classified, and organized the experienced life through their linguistic expressions, and abstracted from individual phenomena. They ‘perceived relationships’ between phenomena, summarized many relationships into ‘networks of relationships’ (often also called ‘models’ or ‘theories’), and studied the ‘functioning of language’ (rather late), the ‘functioning of thought,’ and much more.
‘In the end,’ all these linguistic and intellectual activities led to various philosophers developing different ‘views of everyday life and the world.’ Some ‘later’ philosophers considered such ‘philosophical views’ of ‘earlier’ philosophers for their own ‘production of views,’ but to this day, one cannot claim that there is ‘one grand philosophical view of the world.’ Instead, we find a vast number of fragments and drafts, specific perspectives, some contradictory, with little overlap.
It is striking that there is still no (!) philosophical view of the world that explains philosophy ‘itself,’ its own ’emergence,’ its own ‘functioning.’ There are many reasons why this is so. Even for a philosopher willing to scrutinize all the ‘assumptions of their thinking,’ obstacles exist. One such obstacle is the language within which they philosophize. Philosophizing in a particular language while simultaneously reflecting on the ‘assumptions of that language’ is maximally difficult, and no one has truly succeeded in doing so. To a certain extent, the same applies to their own body, within which the philosopher finds themselves. The complex inner workings of one’s own body are—roughly estimated—accessible to no more than about 1% of any person. Another significant obstacle is the entirety of the culture in a society. Over a lifetime, this culture leaves deep marks on a philosopher’s ‘feelings, thinking, and behavior,’ which can only be questioned and changed to a very limited extent. Finally, not to be overlooked, is the phenomenon of ‘time,’ manifesting as ‘changes’ in the experienced everyday life and in the evolving ‘inner life’ of a philosopher: What was just ‘present’ suddenly becomes ‘past’; what was just ‘blue’ suddenly turns ‘black.’ Everything can change. And what does a philosopher then do with their ‘memories,’ shaped by ‘yesterday’?
This reflection on some of the ‘conditions of a philosopher’s cognition’ may seem ‘depressing,’ extinguishing any ‘hope for useful insight’ at the outset. However, everyday life teaches us that we humans are still here, that even in the ‘scientific field of philosophy,’ there seems to be a kind of ‘development of views (models, theories)’ which give the impression of ‘functioning,’ enabling us to make ‘predictions’ to a limited extent that can be ‘verified as accurate.’
For the further determination of what characterizes the phenomenon of ‘philosophy,’ the focus here will be less on the ‘congealed form’ of philosophy as an educational construct but more on the ‘everyday processes’ where specific people engage in concrete activities that form the ‘framework’ or ‘medium’ within which ‘philosophy for all’ takes place.
Ultimately, ‘philosophy’ is a ‘holistic phenomenon’ that becomes visible in the interplay of many people in an everyday context, is experienced, and can only take shape in this process form. ‘Truth,’ as the ‘core’ of any reality-related thinking, is always only found as a ‘part’ of a process in which the interconnected dynamics are essential to the ‘truth of a matter.’ Therefore, truth is never ‘self-evident,’ never ‘simple,’ never ‘free.’ Truth is a ‘precious substance’ that requires every effort to ‘attain’ and whose state is ‘fleeting,’ as the ‘world’ within which truth can be ‘worked out’ continuously changes as a world. A key factor in this constant change is life itself: the ‘existence of life’ is only possible within an ‘ongoing process’ through which ‘energy’ can illuminate ’emergent images’—not created for ‘resting’ but for ‘becoming,’ whose ultimate goal still appears in many ways ‘open.’ Life can indeed—partially—destroy itself or—partially—empower itself. Somewhere in the midst of all this, we find ourselves. The current year ‘2025’ is actually of little significance for this.
(Start: June 22, 2024, Last change: June 22, 2024)
Starting Point
The main theme of this section is ‘collective human intelligence (CHI)’. However, it does not occur in isolation, detached from everything else. Rather, life on Planet Earth creates a complex network of processes which — upon closer examination — reveal structures that are consistent across all forms of life in their basic parameters, yet differ in parts. It must also be considered that these basic structures, in their process form, always intertwine with other processes, interacting and influencing each other. Therefore, a description of these basic structures will initially be rather sketchy here, as the enormous variety of details can otherwise lead one quickly into the ‘thicket of particulars’.
Important Factors
Basic Life-Pattern
Starting from the individual cell up to the most powerful cell galaxies [1] that life has produced so far, every identifiable form of life exhibits a ‘basic pattern’ of the life process that threads like a ‘red thread’ through all forms of life: as long as there is more than a single life system (a ‘population’), there exists throughout the entire lifespan the basic cycle (i) reproduction of Generation 1 – birth of Generation 2 – growth of Generation 2 – onset of behavior of Generation 2 accompanied by learning processes – reproduction of Generation 2 – ….
Genetic Determinism
This basic pattern, in the phases of ‘reproduction’ and ‘birth’, is largely ‘genetically determined’. [2] The growth process itself—the development of the cell galaxy—is also fundamentally strongly genetically determined, but increasingly factors from the environment of the growth process come into play, which can modify the growth process to varying degrees. Thus, the outcomes of reproduction and growth can vary more or less significantly.
Learning
As growth transforms the cell galaxy into a ‘mature’ state, the entire system can enable different ‘functions’ that increasingly facilitate ‘learning’.
A minimal concept of learning related to acting systems identifies the ‘learning of a system’ by the fact that the ‘behavior’ of a system changes in relation to a specific environmental stimulus over a longer period of time, and this change is ‘more than random’. [3]
‘Learning’ ranges on a scale from ‘relatively determined’ to ‘largely open’. ‘Open’ here means that the control by genetic presets decreases and the system can have individually different experiences within a spectrum of possible actions.
Experiences
Experiences gain their ‘format’ within the following coordinates:
(i) (sensory) perception,
(ii) abstractions of sensory perceptions which are generated internally and which
(iii) are retrievable inside the system. The totality of such conditionally retrievable (recallable) abstractions is also called memory content. [4]
(iv) the possibility of arbitrary abstractions from abstractions, the
(v) storage of sequential events as well as
(vi) abstractions of sequentially occurring events, and the
(vii) free combination of abstractions into new integrated units.
Additionally,
(viii) the ‘perception of internal bodily events’ (also called ‘proprioceptive’ perception) [5], which can ‘link (associate)’ with all other perceptions and abstractions. [6] It is also important to note that it is a characteristic of perception that
(ix) events usually never occur in isolation but appear as ‘part of a spatial structure’. Although ‘subspaces can be distinguished (visually, acoustically, tactilely, etc.), these subspaces can be integrated into a ‘total space’ that has the format of a ‘three-dimensional body space’, with one’s own body as part of it. ‘In thought’, we can consider individual objects ‘by themselves’, detached from a body space, but as soon as we turn to the ‘sensual space of experience’, the three-dimensional spatial structure becomes active.
Individual – Collective
In the individual experience of everyday situations, this ‘inner world of experience’ largely forms in a multitude of ways, largely unconsciously.
However, as soon as ‘human systems’—in short, people—are not alone in a situation but together with others, these people can perceive and remember the same environment ‘similarly’ or ‘differently’. In their individual experiences, different elements can combine into specific patterns.
Coordination of Behavior
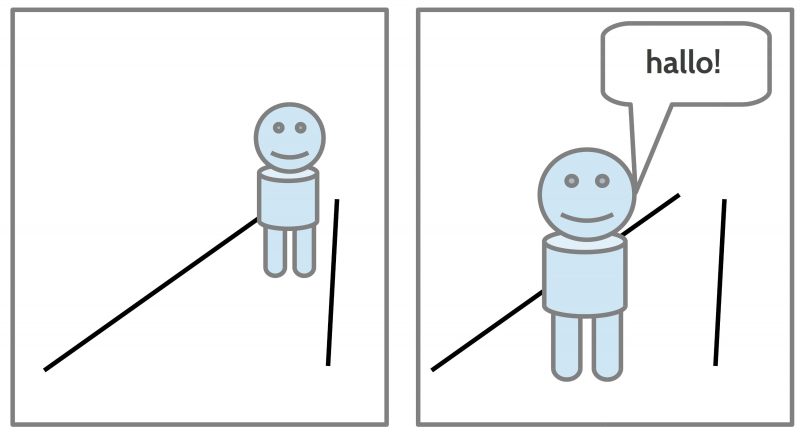
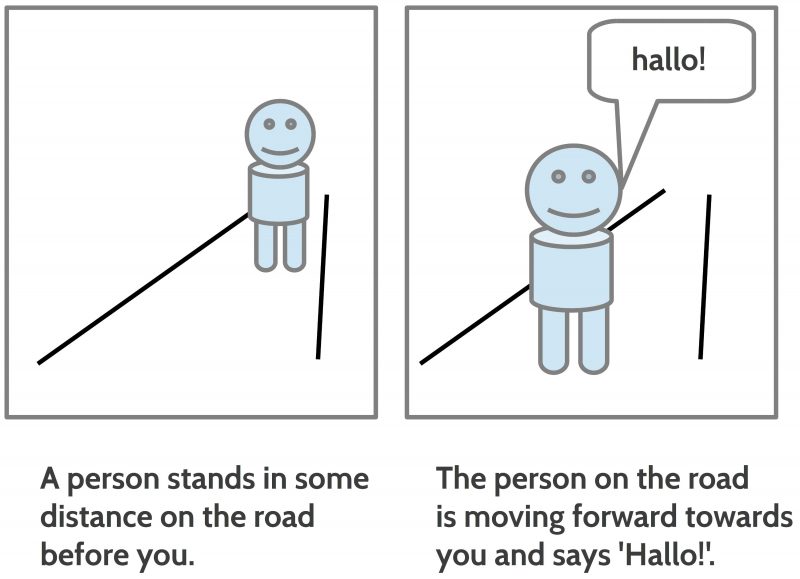
It becomes interesting when different people try to coordinate their behavior, even if it is just to make ‘contact’ with each other. And, although this can also be achieved in various ways without explicit symbolic language [7], sophisticated, complex collective action involving many participants over long periods with demanding tasks, according to current knowledge, is only possible with the inclusion of symbolic language.
The ability of humans to use languages seems to be fundamentally genetically conditioned. [8] ‘How’ language is used, ‘when’, ‘with which memory contents language is linked’, is not genetically conditioned. People must learn this ‘from the particular situation’ both individually and collectively, in coordination with others, since language only makes sense as a ‘common means of communication’ that should enable sophisticated coordination.
Linguistic Meaning
The system of sounds (and later symbols) used in a language is ultimately decided by those who initially use the language together. [9] Given the fact that there are many thousands of languages [10], one can conclude that there is considerable freedom in the specific design of a language. [11]
This ‘freedom in the specific design’ is most evident in the association between language elements and potential meanings. The same ‘object’, ‘event’, or ‘fact’ can be expressed completely differently by people using different languages. [12] And this ‘difference’ refers not only to the naming of individual properties or objects but occurs within a ‘larger context’ of ‘perspectives’ on how the everyday world is perceived, classified, and enacted within a specific language community. These differences also occur ‘within a language community’ in the form of ‘milieus’/’social strata’, where the ‘practice of life’ differs.
The most important aspect of the relationship between the language system (sounds, symbols, the arrangement of sounds and symbols) and possible ‘meaning content’ is that any type of ‘content’ is located within the person (inside the ‘system’).[13]
As the brief sketch above on the space of experience suggests, the elements that can constitute an experiential space are so layered and dynamic that an assignment between language elements and elements of experience is fundamentally incomplete. Additionally, two different systems (people) can only agree on elements of experience as ‘linguistic meaning’ if they have ‘common reference points’ in their individual experiential spaces. Due to the structure of the system, there exist only the following ‘types of reference points’:
(i) There are sensory perceptions of circumstances in a commonly shared environment that can be perceived ‘sufficiently’ similarly by all participants (and are automatically (unconsciously!) transformed into more abstract units in the experiential space).
(ii) There are internal body perceptions that normally occur similarly in each person due to a genetically determined structural similarity.[14]
(iii) There are internal perceptions of internal processes that also normally occur similarly in each person due to a genetically determined structural similarity. [15]
The more ‘similar’ such internal structures are and the more ‘constant’ they occur, the greater the likelihood that different language participants can form ‘internal working hypotheses’ about what the other means when using certain linguistic expressions. The more the content of experience deviates from types (i) – (iii), the more difficult or impossible it becomes to reach an agreement.
The question of ‘true statements’ and ‘verifiable predictions’ is a specific subset of the problem of meaning, which is treated separately.
Complex Language Forms
Even the assignment and determination of meaning in relatively ‘simple’ linguistic expressions is not straightforward, and it becomes quickly ‘blurred’ and ‘vague’ in ‘more complex language forms’. The discussions and research on this topic are incredibly extensive.[16]
I would like to briefly remind you of the example of Ludwig Wittgenstein, who first experimentally played through the very simple meaning concept of modern formal logic in his early work, ‘Tractatus Logico-Philosophicus’ (1921), but then, many years later (1936 – 1946), reexamined the problem of meaning using everyday language and many concrete examples. He discovered — not surprisingly — that ‘normal language’ functions differently and is significantly more complex than the simple meaning model of formal logic assumed. [17] What Wittgenstein discovered in his ‘everyday’ analyses was so multi-layered and complex that he found himself unable to transform it into a systematic presentation.[18]
Generally, it can be said that to this day there is not even a rudimentary comprehensive and accurate ‘theory of the meaning of normal language’. [19]
The emergence and proliferation of ‘generative artificial intelligence’ (Generative AI) in recent years [20] may offer an unexpected opportunity to revisit this problem entirely anew. Here, modern engineering demonstrates that simple algorithms, which possess no inherent meaning knowledge of their own, are capable of producing linguistic output by using only language material in linguistic interaction with humans. [21] This output is substantial, structured, and arranged in such a way that humans perceive it as if it were generated by a human, which is ultimately true. [22] What a person admires in this linguistic output is essentially ‘himself’, though not in his individual language performances, which are often worse than those generated by the algorithms. What the individual user encounters in such generated texts is essentially the ‘collective language knowledge’ of millions of people, which would not be accessible to us without these algorithms in this extracted form.
These generative algorithms [23] can be compared to the invention of the microscope, the telescope, or modern mathematics: all these inventions have enabled humans to recognize facts and structures that would have remained invisible without these tools. The true extent of collective linguistic performances would remain ‘invisible’ without modern technology, simply because humans without these technologies could not comprehend the scope and scale, along with all the details.
Preliminary Interim Result
The considerations so far only give a first outline of what collective intelligence can be or is.
[1] Reminder: If we assume that the number of stars in our home galaxy, the Milky Way, is estimated at 100 – 400 billion stars and we take 200 billion as our estimate, then our body system would correspond to the scope of 700 galaxies the size of the Milky Way, one cell for one star… a single body!
[2] We know today that genes can change in different ways or be altered during various phases.
[3] Simplifying, we can say that ‘randomness’ in a ‘distribution-free form’ means that each of the known possible continuations is ‘equally likely’; none of the possible continuations shows a ‘higher frequency’ over time than any of the others. Randomness with an ‘implicit distribution’ is noticeable because, although the possible continuations are random, certain continuations show a different frequency over time than others. All these particular individual frequencies together reveal a ‘pattern’ by which they can be characterized. An example of ‘randomness with a distribution’ is the ‘natural (or Gaussian) distribution’.
[4] The concept of ‘memory’ is a theoretical notion, the empirical and functional description of which has not yet been fully completed. Literature distinguishes many different ‘forms of memory’ such as ‘short-term memory’, ‘long-term memory’, ‘sensory memory’, ‘episodic memory’, and many more.
[5] For example, ‘joint positioning’, ‘pain’, ‘feeling of fullness’, ‘discomfort’, ‘hunger’, ‘thirst’, various ’emotions’, etc.
[6] One then perceives not just a ‘blue sky’ and feels a ‘light breeze on the skin’ at the same time, but also experiences a sense of ‘malaise’, ‘fever’, perhaps even a ‘feeling of dejection’ and the like.
[7] In biological behavioral research, there are countless examples of life forms showing impressive coordination achievements, such as during collective hunting, organizing the upbringing of offspring, within the ‘family unit’, learning the ‘dialects’ of their respective languages, handling tools, etc.
[8] Every child can learn any known human language anywhere, provided there is an environment in which a language is practiced. Many thousands of different languages are known.
[9] The exact mechanism by which a language first arises among a group of people remains unclear to this day. However, there are increasingly more computer simulations of language learning (language evolution) that attempt to shed light on this. Given the enormous number of factors involved in real language use, these simulations still appear ‘rather simple’.
[10] As we know from many records, there were many other languages in previous times that eventually died out (‘dead languages’), and only written records of them exist. It is also interesting to consider cases in which a language has ‘evolved’, where older forms continue to exist in texts.
[11] Language research (many different disciplines work together here) suggests the working hypothesis that (i) the type and scope of sounds used in a language, due to the human speech apparatus, represent a finite set that is more or less similar across all languages, although there are still different sets of sounds between the major language families. Furthermore, (ii) many analyses of the structure of spoken and then written language suggest that there are ‘basic structures’ (‘syntax’) that can be found—with variations—in all languages.
[12] Anyone who comes into contact with people who speak a different language can experience this up close and concretely.
[13] In light of modern brain research and general physiology, the ‘location’ here would be assumed to be the brain. However, this location is of little use, as the research into the material brain in the body, along with its interactions with the surrounding body, has hardly been able to grasp the exact mechanisms of ‘meaning assignments’ (just as one cannot identify the algorithm being executed based on the physical signals of computer chips alone from those signals).
[14] For example, ‘hunger’, ‘thirst’, ‘toothache’…
[15] The ‘remembering’ of something that has happened before; the ‘recognition’ of something sensually concrete that one can ‘remember’; the ‘combining’ of memorable things into new ‘constellations’, and much more.
[16] Parts of this discussion can be found in the context of ‘text analyses’, ‘text interpretations’, ‘hermeneutics’, ‘Bible interpretation’, etc.
[17] Which is not surprising at all, since modern formal logic could only arise because it had programmatically radically departed from what has to do with everyday linguistic meaning. What was left were only ‘stubs of an abstract truth’ in the form of abstract ‘truth values’ that were devoid of any meaning.
[18] His posthumously published ‘Philosophical Investigations’ (1953) therefore offer ‘only’ a collection of individual insights, but these were influential enough to impact reflections on linguistic meaning worldwide.
[19] The list of publications titled around the ‘meaning of language’ is exceedingly long. However, this does not change the fact that none of these publications satisfactorily solve the problem comprehensively. It is currently not foreseeable how a solution could emerge, as this would require the cooperation of many disciplines, which in current university operations are well distributed and separated into ‘existences of their own’.
[20] With chatGPT as an example.
[21] Millions of texts produced by humans for the purpose of ‘communicating content’.
[22] Which ultimately is true, because the algorithms themselves do not ‘invent’ text, but use ‘actually used’ linguistic expressions from existing texts to generate ‘highly probable’ combinations of expressions that humans would likely use.
[23] These cannot be seen in isolation: without extremely powerful computing centers along with corresponding global networks and social structures that make widespread use possible, these algorithms would be worthless. Here, indirectly, what has become possible and functions in everyday life due to collective human intelligence also shines through.
The whole text shows a dynamic, which induces many changes. Difficult to plan ‘in advance’.
Perhaps, some time, it will look like a ‘book’, at least ‘for a moment’.
I have started a ‘book project’ in parallel. This was motivated by the need to provide potential users of our new oksimo.R software with a coherent explanation of how the oksimo.R software, when used, generates an empirical theory in the format of a screenplay. The primary source of the book is in German and will be translated step by step here in the uffmm.blog.
INTRODUCTION
In a rather foundational paper about an idea, how one can generalize ‘systems engineering’ [*1] to the art of ‘theory engineering’ [1] a new conceptual framework has been outlined for a ‘sustainable applied empirical theory (SAET)’. Part of this new framework has been the idea that the classical recourse to groups of special experts (mostly ‘engineers’ in engineering) is too restrictive in the light of the new requirement of being sustainable: sustainability is primarily based on ‘diversity’ combined with the ‘ability to predict’ from this diversity probable future states which keep life alive. The aspect of diversity induces the challenge to see every citizen as a ‘natural expert’, because nobody can know in advance and from some non-existing absolut point of truth, which knowledge is really important. History shows that the ‘mainstream’ is usually to a large degree ‘biased’ [*1b].
With this assumption, that every citizen is a ‘natural expert’, science turns into a ‘general science’ where all citizens are ‘natural members’ of science. I will call this more general concept of science ‘sustainable citizen science (SCS)’ or ‘Citizen Science 2.0 (CS2)’. The important point here is that a sustainable citizen science is not necessarily an ‘arbitrary’ process. While the requirement of ‘diversity’ relates to possible contents, to possible ideas, to possible experiments, and the like, it follows from the other requirement of ‘predictability’/ of being able to make some useful ‘forecasts’, that the given knowledge has to be in a format, which allows in a transparent way the construction of some consequences, which ‘derive’ from the ‘given’ knowledge and enable some ‘new’ knowledge. This ability of forecasting has often been understood as the business of ‘logic’ providing an ‘inference concept’ given by ‘rules of deduction’ and a ‘practical pattern (on the meta level)’, which defines how these rules have to be applied to satisfy the inference concept. But, looking to real life, to everyday life or to modern engineering and economy, one can learn that ‘forecasting’ is a complex process including much more than only cognitive structures nicely fitting into some formulas. For this more realistic forecasting concept we will use here the wording ‘common logic’ and for the cognitive adventure where common logic is applied we will use the wording ‘common science’. ‘Common science’ is structurally not different from ‘usual science’, but it has a substantial wider scope and is using the whole of mankind as ‘experts’.
The following chapters/ sections try to illustrate this common science view by visiting different special views which all are only ‘parts of a whole’, a whole which we can ‘feel’ in every moment, but which we can not yet completely grasp with our theoretical concepts.
CONTENT
Language (Main message: “The ordinary language is the ‘meta language’ to every special language. This can be used as a ‘hint’ to something really great: the mystery of the ‘self-creating’ power of the ordinary language which for most people is unknown although it happens every moment.”)
Concrete Abstract Statements (Main message: “… you will probably detect, that nearly all words of a language are ‘abstract words’ activating ‘abstract meanings’. …If you cannot provide … ‘concrete situations’ the intended meaning of your abstract words will stay ‘unclear’: they can mean ‘nothing or all’, depending from the decoding of the hearer.”)
True False Undefined (Main message: “… it reveals that ’empirical (observational) evidence’ is not necessarily an automatism: it presupposes appropriate meaning spaces embedded in sets of preferences, which are ‘observation friendly’.“
Beyond Now (Main message: “With the aid of … sequences revealing possible changes the NOW is turned into a ‘moment’ embedded in a ‘process’, which is becoming the more important reality. The NOW is something, but the PROCESS is more.“)
Playing with the Future (Main message: “In this sense seems ‘language’ to be the master tool for every brain to mediate its dynamic meaning structures with symbolic fix points (= words, expressions) which as such do not change, but the meaning is ‘free to change’ in any direction. And this ‘built in ‘dynamics’ represents an ‘internal potential’ for uncountable many possible states, which could perhaps become ‘true’ in some ‘future state’. Thus ‘future’ can begin in these potentials, and thinking is the ‘playground’ for possible futures.(but see [18])”)
Forecasting – Prediction: What? (This chapter explains the cognitive machinery behind forecasting/ predictions, how groups of human actors can elaborate shared descriptions, and how it is possible to start with sequences of singularities to built up a growing picture of the empirical world which appears as a radical infinite and indeterministic space. )
!!! From here all the following chapters have to be re-written !!!
Boolean Logic (Explains what boolean logic is, how it enables the working of programmable machines, but that it is of nearly no help for the ‘heart’ of forecasting.)
/* Often people argue against the usage of the wikipedia encyclopedia as not ‘scientific’ because the ‘content’ of an entry in this encyclopedia can ‘change’. This presupposes the ‘classical view’ of scientific texts to be ‘stable’, which presupposes further, that such a ‘stable text’ describes some ‘stable subject matter’. But this view of ‘steadiness’ as the major property of ‘true descriptions’ is in no correspondence with real scientific texts! The reality of empirical science — even as in some special disciplines like ‘physics’ — is ‘change’. Looking to Aristotle’s view of nature, to Galileo Galilei, to Newton, to Einstein and many others, you will not find a ‘single steady picture’ of nature and science, and physics is only a very simple strand of science compared to the live-sciences and many others. Thus wikipedia is a real scientific encyclopedia give you the breath of world knowledge with all its strengths and limits at once. For another, more general argument, see In Favour for Wikipedia */
[*1] Meaning operator ‘…’ : In this text (and in nearly all other texts of this author) the ‘inverted comma’ is used quite heavily. In everyday language this is not common. In some special languages (theory of formal languages or in programming languages or in meta-logic) the inverted comma is used in some special way. In this text, which is primarily a philosophical text, the inverted comma sign is used as a ‘meta-language operator’ to raise the intention of the reader to be aware, that the ‘meaning’ of the word enclosed in the inverted commas is ‘text specific’: in everyday language usage the speaker uses a word and assumes tacitly that his ‘intended meaning’ will be understood by the hearer of his utterance as ‘it is’. And the speaker will adhere to his assumption until some hearer signals, that her understanding is different. That such a difference is signaled is quite normal, because the ‘meaning’ which is associated with a language expression can be diverse, and a decision, which one of these multiple possible meanings is the ‘intended one’ in a certain context is often a bit ‘arbitrary’. Thus, it can be — but must not — a meta-language strategy, to comment to the hearer (or here: the reader), that a certain expression in a communication is ‘intended’ with a special meaning which perhaps is not the commonly assumed one. Nevertheless, because the ‘common meaning’ is no ‘clear and sharp subject’, a ‘meaning operator’ with the inverted commas has also not a very sharp meaning. But in the ‘game of language’ it is more than nothing 🙂
[*1b] That the main stream ‘is biased’ is not an accident, not a ‘strange state’, not a ‘failure’, it is the ‘normal state’ based on the deeper structure how human actors are ‘built’ and ‘genetically’ and ‘cultural’ ‘programmed’. Thus the challenge to ‘survive’ as part of the ‘whole biosphere’ is not a ‘partial task’ to solve a single problem, but to solve in some sense the problem how to ‘shape the whole biosphere’ in a way, which enables a live in the universe for the time beyond that point where the sun is turning into a ‘red giant’ whereby life will be impossible on the planet earth (some billion years ahead)[22]. A remarkable text supporting this ‘complex view of sustainability’ can be found in Clark and Harvey, summarized at the end of the text. [23]
[*2] The meaning of the expression ‘normal’ is comparable to a wicked problem. In a certain sense we act in our everyday world ‘as if there exists some standard’ for what is assumed to be ‘normal’. Look for instance to houses, buildings: to a certain degree parts of a house have a ‘standard format’ assuming ‘normal people’. The whole traffic system, most parts of our ‘daily life’ are following certain ‘standards’ making ‘planning’ possible. But there exists a certain percentage of human persons which are ‘different’ compared to these introduced standards. We say that they have a ‘handicap’ compared to this assumed ‘standard’, but this so-called ‘standard’ is neither 100% true nor is the ‘given real world’ in its properties a ‘100% subject’. We have learned that ‘properties of the real world’ are distributed in a rather ‘statistical manner’ with different probabilities of occurrences. To ‘find our way’ in these varying occurrences we try to ‘mark’ the main occurrences as ‘normal’ to enable a basic structure for expectations and planning. Thus, if in this text the expression ‘normal’ is used it refers to the ‘most common occurrences’.
[*3] Thus we have here a ‘threefold structure’ embracing ‘perception events, memory events, and expression events’. Perception events represent ‘concrete events’; memory events represent all kinds of abstract events but they all have a ‘handle’ which maps to subsets of concrete events; expression events are parts of an abstract language system, which as such is dynamically mapped onto the abstract events. The main source for our knowledge about perceptions, memory and expressions is experimental psychology enhanced by many other disciplines.
[*4] Characterizing language expressions by meaning – the fate of any grammar: the sentence ” … ‘words’ (= expressions) of a language which can activate such abstract meanings are understood as ‘abstract words’, ‘general words’, ‘category words’ or the like.” is pointing to a deep property of every ordinary language, which represents the real power of language but at the same time the great weakness too: expressions as such have no meaning. Hundreds, thousands, millions of words arranged in ‘texts’, ‘documents’ can show some statistical patterns’ and as such these patterns can give some hint which expressions occur ‘how often’ and in ‘which combinations’, but they never can give a clue to the associated meaning(s). During more than three-thousand years humans have tried to describe ordinary language in a more systematic way called ‘grammar’. Due to this radically gap between ‘expressions’ as ‘observable empirical facts’ and ‘meaning constructs’ hidden inside the brain it was all the time a difficult job to ‘classify’ expressions as representing a certain ‘type’ of expression like ‘nouns’, ‘predicates’, ‘adjectives’, ‘defining article’ and the like. Without regressing to the assumed associated meaning such a classification is not possible. On account of the fuzziness of every meaning ‘sharp definitions’ of such ‘word classes’ was never and is not yet possible. One of the last big — perhaps the biggest ever — project of a complete systematic grammar of a language was the grammar project of the ‘Akademie der Wissenschaften der DDR’ (‘Academy of Sciences of the GDR’) from 1981 with the title “Grundzüge einer Deutschen Grammatik” (“Basic features of a German grammar”). A huge team of scientists worked together using many modern methods. But in the preface you can read, that many important properties of the language are still not sufficiently well describable and explainable. See: Karl Erich Heidolph, Walter Flämig, Wolfgang Motsch et al.: Grundzüge einer deutschen Grammatik. Akademie, Berlin 1981, 1028 Seiten.
[*5] Differing opinions about a given situation manifested in uttered expressions are a very common phenomenon in everyday communication. In some sense this is ‘natural’, can happen, and it should be no substantial problem to ‘solve the riddle of being different’. But as you can experience, the ability of people to solve the occurrence of different opinions is often quite weak. Culture is suffering by this as a whole.
[1] Gerd Doeben-Henisch, 2022, From SYSTEMS Engineering to THEORYEngineering, see: https://www.uffmm.org/2022/05/26/from-systems-engineering-to-theory-engineering/(Remark: At the time of citation this post was not yet finished, because there are other posts ‘corresponding’ with that post, which are too not finished. Knowledge is a dynamic network of interwoven views …).
[1d] ‘usual science’ is the game of science without having a sustainable format like in citizen science 2.0.
[2] Science, see e.g. wkp-en: https://en.wikipedia.org/wiki/Science
Citation = “In modern science, the term “theory” refers to scientific theories, a well-confirmed type of explanation of nature, made in a way consistent with the scientific method, and fulfilling the criteria required by modern science. Such theories are described in such a way that scientific tests should be able to provide empirical support for it, or empirical contradiction (“falsify“) of it. Scientific theories are the most reliable, rigorous, and comprehensive form of scientific knowledge,[1] in contrast to more common uses of the word “theory” that imply that something is unproven or speculative (which in formal terms is better characterized by the word hypothesis).[2] Scientific theories are distinguished from hypotheses, which are individual empirically testableconjectures, and from scientific laws, which are descriptive accounts of the way nature behaves under certain conditions.”
[2b] History of science in wkp-en: https://en.wikipedia.org/wiki/History_of_science#Scientific_Revolution_and_birth_of_New_Science
[3] Theory, see wkp-en: https://en.wikipedia.org/wiki/Theory#:~:text=A%20theory%20is%20a%20rational,or%20no%20discipline%20at%20all.
Citation = “A theory is a rational type of abstract thinking about a phenomenon, or the results of such thinking. The process of contemplative and rational thinking is often associated with such processes as observational study or research. Theories may be scientific, belong to a non-scientific discipline, or no discipline at all. Depending on the context, a theory’s assertions might, for example, include generalized explanations of how nature works. The word has its roots in ancient Greek, but in modern use it has taken on several related meanings.”
Citation = “In modern science, the term “theory” refers to scientific theories, a well-confirmed type of explanation of nature, made in a way consistent with the scientific method, and fulfilling the criteria required by modern science. Such theories are described in such a way that scientific tests should be able to provide empirical support for it, or empirical contradiction (“falsify“) of it. Scientific theories are the most reliable, rigorous, and comprehensive form of scientific knowledge,[1] in contrast to more common uses of the word “theory” that imply that something is unproven or speculative (which in formal terms is better characterized by the word hypothesis).[2] Scientific theories are distinguished from hypotheses, which are individual empirically testableconjectures, and from scientific laws, which are descriptive accounts of the way nature behaves under certain conditions.”
[4b] Empiricism in wkp-en: https://en.wikipedia.org/wiki/Empiricism
[4c] Scientific method in wkp-en: https://en.wikipedia.org/wiki/Scientific_method
Citation =”The scientific method is an empirical method of acquiring knowledge that has characterized the development of science since at least the 17th century (with notable practitioners in previous centuries). It involves careful observation, applying rigorous skepticism about what is observed, given that cognitive assumptions can distort how one interprets the observation. It involves formulating hypotheses, via induction, based on such observations; experimental and measurement-based statistical testing of deductions drawn from the hypotheses; and refinement (or elimination) of the hypotheses based on the experimental findings. These are principles of the scientific method, as distinguished from a definitive series of steps applicable to all scientific enterprises.[1][2][3] [4c]
and
Citation = “The purpose of an experiment is to determine whether observations[A][a][b] agree with or conflict with the expectations deduced from a hypothesis.[6]: Book I, [6.54] pp.372, 408 [b] Experiments can take place anywhere from a garage to a remote mountaintop to CERN’s Large Hadron Collider. There are difficulties in a formulaic statement of method, however. Though the scientific method is often presented as a fixed sequence of steps, it represents rather a set of general principles.[7] Not all steps take place in every scientific inquiry (nor to the same degree), and they are not always in the same order.[8][9]”
[5] Gerd Doeben-Henisch, “Is Mathematics a Fake? No! Discussing N.Bourbaki, Theory of Sets (1968) – Introduction”, 2022, https://www.uffmm.org/2022/06/06/n-bourbaki-theory-of-sets-1968-introduction/
[6] Logic, see wkp-en: https://en.wikipedia.org/wiki/Logic
[7] W. C. Kneale, The Development of Logic, Oxford University Press (1962)
[8] Set theory, in wkp-en: https://en.wikipedia.org/wiki/Set_theory
[9] N.Bourbaki, Theory of Sets , 1968, with a chapter about structures, see: https://en.wikipedia.org/wiki/%C3%89l%C3%A9ments_de_math%C3%A9matique
[10] = [5]
[11] Ludwig Josef Johann Wittgenstein ( 1889 – 1951): https://en.wikipedia.org/wiki/Ludwig_Wittgenstein
[12] Ludwig Wittgenstein, 1953: Philosophische Untersuchungen [PU], 1953: Philosophical Investigations [PI], translated by G. E. M. Anscombe /* For more details see: https://en.wikipedia.org/wiki/Philosophical_Investigations */
[13] Wikipedia EN, Speech acts: https://en.wikipedia.org/wiki/Speech_act
[14] While the world view constructed in a brain is ‘virtual’ compared to the ‘real word’ outside the brain (where the body outside the brain is also functioning as ‘real world’ in relation to the brain), does the ‘virtual world’ in the brain function for the brain mostly ‘as if it is the real world’. Only under certain conditions can the brain realize a ‘difference’ between the triggering outside real world and the ‘virtual substitute for the real world’: You want to use your bicycle ‘as usual’ and then suddenly you have to notice that it is not at that place where is ‘should be’. …
[15] Propositional Calculus, see wkp-en: https://en.wikipedia.org/wiki/Propositional_calculus#:~:text=Propositional%20calculus%20is%20a%20branch,of%20arguments%20based%20on%20them.
[16] Boolean algebra, see wkp-en: https://en.wikipedia.org/wiki/Boolean_algebra
[17] Boolean (or propositional) Logic: As one can see in the mentioned articles of the English wikipedia, the term ‘boolean logic’ is not common. The more logic-oriented authors prefer the term ‘boolean calculus’ [15] and the more math-oriented authors prefer the term ‘boolean algebra’ [16]. In the view of this author the general view is that of ‘language use’ with ‘logic inference’ as leading idea. Therefore the main topic is ‘logic’, in the case of propositional logic reduced to a simple calculus whose similarity with ‘normal language’ is widely ‘reduced’ to a play with abstract names and operators. Recommended: the historical comments in [15].
[18] Clearly, thinking alone can not necessarily induce a possible state which along the time line will become a ‘real state’. There are numerous factors ‘outside’ the individual thinking which are ‘driving forces’ to push real states to change. But thinking can in principle synchronize with other individual thinking and — in some cases — can get a ‘grip’ on real factors causing real changes.
[19] This kind of knowledge is not delivered by brain science alone but primarily from experimental (cognitive) psychology which examines observable behavior and ‘interprets’ this behavior with functional models within an empirical theory.
[20] Predicate Logic or First-Order Logic or … see: wkp-en: https://en.wikipedia.org/wiki/First-order_logic#:~:text=First%2Dorder%20logic%E2%80%94also%20known,%2C%20linguistics%2C%20and%20computer%20science.
[21] Gerd Doeben-Henisch, In Favour of Wikipedia, https://www.uffmm.org/2022/07/31/in-favour-of-wikipedia/, 31 July 2022
[22] The sun, see wkp-ed https://en.wikipedia.org/wiki/Sun (accessed 8 Aug 2022)
[23] By Clark, William C., and Alicia G. Harley – https://doi.org/10.1146/annurev-environ-012420-043621, Clark, William C., and Alicia G. Harley. 2020. “Sustainability Science: Toward a Synthesis.” Annual Review of Environment and Resources 45 (1): 331–86, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=109026069
[24] Sustainability in wkp-en: https://en.wikipedia.org/wiki/Sustainability#Dimensions_of_sustainability
[27] SDG 4 in wkp-en: https://en.wikipedia.org/wiki/Sustainable_Development_Goal_4
[28] Thomas Rid, Rise of the Machines. A Cybernetic History, W.W.Norton & Company, 2016, New York – London
[29] Doeben-Henisch, G., 2006, Reducing Negative Complexity by a Semiotic System In: Gudwin, R., & Queiroz, J., (Eds). Semiotics and Intelligent Systems Development. Hershey et al: Idea Group Publishing, 2006, pp.330-342
[30] Döben-Henisch, G., Reinforcing the global heartbeat: Introducing the planet earth simulator project, In M. Faßler & C. Terkowsky (Eds.), URBAN FICTIONS. Die Zukunft des Städtischen. München, Germany: Wilhelm Fink Verlag, 2006, pp.251-263
[29] The idea that individual disciplines are not good enough for the ‘whole of knowledge’ is expressed in a clear way in a video of the theoretical physicist and philosopher Carlo Rovell: Carlo Rovelli on physics and philosophy, June 1, 2022, Video from the Perimeter Institute for Theoretical Physics. Theoretical physicist, philosopher, and international bestselling author Carlo Rovelli joins Lauren and Colin for a conversation about the quest for quantum gravity, the importance of unlearning outdated ideas, and a very unique way to get out of a speeding ticket.
[] By Azote for Stockholm Resilience Centre, Stockholm University – https://www.stockholmresilience.org/research/research-news/2016-06-14-how-food-connects-all-the-sdgs.html, CC BY 4.0, https://commons.wikimedia.org/w/index.php?curid=112497386
[] Sierra Club in wkp-en: https://en.wikipedia.org/wiki/Sierra_Club
[] Herbert Bruderer, Where is the Cradle of the Computer?, June 20, 2022, URL: https://cacm.acm.org/blogs/blog-cacm/262034-where-is-the-cradle-of-the-computer/fulltext (accessed: July 20, 2022)
[] UN. Secretary-General; World Commission on Environment and Development, 1987, Report of the World Commission on Environment and Development : note / by the Secretary-General., https://digitallibrary.un.org/record/139811 (accessed: July 20, 2022) (A more readable format: https://sustainabledevelopment.un.org/content/documents/5987our-common-future.pdf )
/* Comment: Gro Harlem Brundtland (Norway) has been the main coordinator of this document */
[] Chaudhuri, S.,et al.Neurosymbolic programming. Foundations and Trends in Programming Languages 7, 158-243 (2021).
[] Nello Cristianini, Teresa Scantamburlo, James Ladyman, The social turn of artificial intelligence, in: AI & SOCIETY, https://doi.org/10.1007/s00146-021-01289-8
[] Carl DiSalvo, Phoebe Sengers, and Hrönn Brynjarsdóttir, Mapping the landscape of sustainable hci, In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, CHI ’10, page 1975–1984, New York, NY, USA, 2010. Association for Computing Machinery.
[] Claude Draude, Christian Gruhl, Gerrit Hornung, Jonathan Kropf, Jörn Lamla, Jan Marco Leimeister, Bernhard Sick, Gerd Stumme, Social Machines, in: Informatik Spektrum, https://doi.org/10.1007/s00287-021-01421-4
[] EU: High-Level Expert Group on AI (AI HLEG), A definition of AI: Main capabilities and scientific disciplines, European Commission communications published on 25 April 2018 (COM(2018) 237 final), 7 December 2018 (COM(2018) 795 final) and 8 April 2019 (COM(2019) 168 final). For our definition of Artificial Intelligence (AI), please refer to our document published on 8 April 2019: https://ec.europa.eu/newsroom/dae/document.cfm?doc_id=56341
[] EU: High-Level Expert Group on AI (AI HLEG), Policy and investment recommendations for trustworthy Artificial Intelligence, 2019, https://digital-strategy.ec.europa.eu/en/library/policy-and-investment-recommendations-trustworthy-artificial-intelligence
[] European Union. Regulation 2016/679 of the European Parliament and of the Council of 27 April 2016 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data, and repealing Directive 95/46/EC General Data Protection Regulation; http://eur-lex.europa.eu/eli/reg/2016/679/oj (Wirksam ab 25.Mai 2018) [26.2.2022]
[] C.S. Holling. Resilience and stability of ecological systems. Annual Review of Ecology and Systematics, 4(1):1–23, 1973
[] John P. van Gigch. 1991. System Design Modeling and Metamodeling. Springer US. DOI:https://doi.org/10.1007/978-1-4899-0676-2
[] Gudwin, R.R. (2003), On a Computational Model of the Peircean Semiosis, IEEE KIMAS 2003 Proceedings
[] J.A. Jacko and A. Sears, Eds., The Human-Computer Interaction Handbook. Fundamentals, Evolving Technologies, and emerging Applications. 1st edition, 2003.
[] LeCun, Y., Bengio, Y., & Hinton, G. Deep learning. Nature 521, 436-444 (2015).
[] Lenat, D. What AI can learn from Romeo & Juliet.Forbes (2019)
[] Pierre Lévy, Collective Intelligence. mankind’s emerging world in cyberspace, Perseus books, Cambridge (M A), 1997 (translated from the French Edition 1994 by Robert Bonnono)
[] Lexikon der Nachhaltigkeit, ‘Starke Nachhaltigkeit‘, https://www.nachhaltigkeit.info/artikel/schwache_vs_starke_nachhaltigkeit_1687.htm (acessed: July 21, 2022)
[] Michael L. Littman, Ifeoma Ajunwa, Guy Berger, Craig Boutilier, Morgan Currie, Finale Doshi-Velez, Gillian Hadfield, Michael C. Horowitz, Charles Isbell, Hiroaki Kitano, Karen Levy, Terah Lyons, Melanie Mitchell, Julie Shah, Steven Sloman, Shannon Vallor, and Toby Walsh. “Gathering Strength, Gathering Storms: The One Hundred Year Study on Artificial Intelligence (AI100) 2021 Study Panel Report.” Stanford University, Stanford, CA, September 2021. Doc: http://ai100.stanford.edu/2021-report.
[] Kathryn Merrick. Value systems for developmental cognitive robotics: A survey. Cognitive Systems Research, 41:38 – 55, 2017
[] Illah Reza Nourbakhsh and Jennifer Keating, AI and Humanity, MIT Press, 2020 /* An examination of the implications for society of rapidly advancing artificial intelligence systems, combining a humanities perspective with technical analysis; includes exercises and discussion questions. */
[] Olazaran, M. , A sociological history of the neural network controversy. Advances in Computers37, 335-425 (1993).
[] Friedrich August Hayek (1945), The use of knowledge in society. The American Economic Review 35, 4 (1945), 519–530
[] Karl Popper, „A World of Propensities“, in: Karl Popper, „A World of Propensities“, Thoemmes Press, Bristol, (Vortrag 1988, leicht erweitert neu abgedruckt 1990, repr. 1995)
[] Karl Popper, „Towards an Evolutionary Theory of Knowledge“, in: Karl Popper, „A World of Propensities“, Thoemmes Press, Bristol, (Vortrag 1989, ab gedruckt in 1990, repr. 1995)
[] Karl Popper, „All Life is Problem Solving“, Artikel, ursprünglich ein Vortrag 1991 auf Deutsch, erstmalig publiziert in dem Buch (auf Deutsch) „Alles Leben ist Problemlösen“ (1994), dann in dem Buch (auf Englisch) „All Life is Problem Solving“, 1999, Routledge, Taylor & Francis Group, London – New York
[] A. Sears and J.A. Jacko, Eds., The Human-Computer Interaction Handbook. Fundamentals, Evolving Technologies, and emerging Applications. 2nd edition, 2008.
[] Skaburskis, Andrejs (19 December 2008). “The origin of “wicked problems””. Planning Theory & Practice. 9 (2): 277-280. doi:10.1080/14649350802041654. At the end of Rittel’s presentation, West Churchman responded with that pensive but expressive movement of voice that some may well remember, ‘Hmm, those sound like “wicked problems.”‘
[] Thoppilan, R., et al. LaMDA: Language models for dialog applications. arXiv 2201.08239 (2022).
[] Wurm, Daniel; Zielinski, Oliver; Lübben, Neeske; Jansen, Maike; Ramesohl, Stephan (2021) : Wege in eine ökologische Machine Economy: Wir brauchen eine ‘Grüne Governance der Machine Economy’, um das Zusammenspiel von Internet of Things, Künstlicher Intelligenz und Distributed Ledger Technology ökologisch zu gestalten, Wuppertal Report, No. 22, Wuppertal Institut für Klima, Umwelt, Energie, Wuppertal, https://doi.org/10.48506/opus-7828
[] Aimee van Wynsberghe, Sustainable AI: AI for sustainability and the sustainability of AI, in: AI and Ethics (2021) 1:213–218, see: https://doi.org/10.1007/s43681
[] R. I. Damper (2000), Editorial for the special issue on ‘Emergent Properties of Complex Systems’: Emergence and levels of abstraction. International Journal of Systems Science 31, 7 (2000), 811–818. DOI:https://doi.org/10.1080/002077200406543
[] Gerd Doeben-Henisch (2004), The Planet Earth Simulator Project – A Case Study in Computational Semiotics, IEEE AFRICON 2004, pp.417 – 422
[] Eric Bonabeau (2009), Decisions 2.0: The power of collective intelligence. MIT Sloan Management Review 50, 2 (Winter 2009), 45-52.
[] Jim Giles (2005), Internet encyclopaedias go head to head. Nature 438, 7070 (Dec. 2005), 900–901. DOI:https://doi.org/10.1038/438900a
[] T. Bosse, C. M. Jonker, M. C. Schut, and J. Treur (2006), Collective representational content for shared extended mind. Cognitive Systems Research 7, 2-3 (2006), pp.151-174, DOI:https://doi.org/10.1016/j.cogsys.2005.11.007
[] Romina Cachia, Ramón Compañó, and Olivier Da Costa (2007), Grasping the potential of online social networks for foresight. Technological Forecasting and Social Change 74, 8 (2007), oo.1179-1203. DOI:https://doi.org/10.1016/j.techfore.2007.05.006
[] Tom Gruber (2008), Collective knowledge systems: Where the social web meets the semantic web. Web Semantics: Science, Services and Agents on the World Wide Web 6, 1 (2008), 4–13. DOI:https://doi.org/10.1016/j.websem.2007.11.011
[] Luca Iandoli, Mark Klein, and Giuseppe Zollo (2009), Enabling on-line deliberation and collective decision-making through large-scale argumentation. International Journal of Decision Support System Technology 1, 1 (Jan. 2009), 69–92. DOI:https://doi.org/10.4018/jdsst.2009010105
[] Shuangling Luo, Haoxiang Xia, Taketoshi Yoshida, and Zhongtuo Wang (2009), Toward collective intelligence of online communities: A primitive conceptual model. Journal of Systems Science and Systems Engineering 18, 2 (01 June 2009), 203–221. DOI:https://doi.org/10.1007/s11518-009-5095-0
[] Dawn G. Gregg (2010), Designing for collective intelligence. Communications of the ACM 53, 4 (April 2010), 134–138. DOI:https://doi.org/10.1145/1721654.1721691
[] Rolf Pfeifer, Jan Henrik Sieg, Thierry Bücheler, and Rudolf Marcel Füchslin. 2010. Crowdsourcing, open innovation and collective intelligence in the scientific method: A research agenda and operational framework. (2010). DOI:https://doi.org/10.21256/zhaw-4094
[] Martijn C. Schut. 2010. On model design for simulation of collective intelligence. Information Sciences 180, 1 (2010), 132–155. DOI:https://doi.org/10.1016/j.ins.2009.08.006 Special Issue on Collective Intelligence
[] Dimitrios J. Vergados, Ioanna Lykourentzou, and Epaminondas Kapetanios (2010), A resource allocation framework for collective intelligence system engineering. In Proceedings of the International Conference on Management of Emergent Digital EcoSystems (MEDES’10). ACM, New York, NY, 182–188. DOI:https://doi.org/10.1145/1936254.1936285
[] Anita Williams Woolley, Christopher F. Chabris, Alex Pentland, Nada Hashmi, and Thomas W. Malone (2010), Evidence for a collective intelligence factor in the performance of human groups. Science 330, 6004 (2010), 686–688. DOI:https://doi.org/10.1126/science.1193147
[] Michael A. Woodley and Edward Bell (2011), Is collective intelligence (mostly) the General Factor of Personality? A comment on Woolley, Chabris, Pentland, Hashmi and Malone (2010). Intelligence 39, 2 (2011), 79–81. DOI:https://doi.org/10.1016/j.intell.2011.01.004
[] Joshua Introne, Robert Laubacher, Gary Olson, and Thomas Malone (2011), The climate CoLab: Large scale model-based collaborative planning. In Proceedings of the 2011 International Conference on Collaboration Technologies and Systems (CTS’11). 40–47. DOI:https://doi.org/10.1109/CTS.2011.5928663
[] Miguel de Castro Neto and Ana Espírtio Santo (2012), Emerging collective intelligence business models. In MCIS 2012 Proceedings. Mediterranean Conference on Information Systems. https://aisel.aisnet.org/mcis2012/14
[] Peng Liu, Zhizhong Li (2012), Task complexity: A review and conceptualization framework, International Journal of Industrial Ergonomics 42 (2012), pp. 553 – 568
[] Sean Wise, Robert A. Paton, and Thomas Gegenhuber. (2012), Value co-creation through collective intelligence in the public sector: A review of US and European initiatives. VINE 42, 2 (2012), 251–276. DOI:https://doi.org/10.1108/03055721211227273
[] Antonietta Grasso and Gregorio Convertino (2012), Collective intelligence in organizations: Tools and studies. Computer Supported Cooperative Work (CSCW) 21, 4 (01 Oct 2012), 357–369. DOI:https://doi.org/10.1007/s10606-012-9165-3
[] Sandro Georgi and Reinhard Jung (2012), Collective intelligence model: How to describe collective intelligence. In Advances in Intelligent and Soft Computing. Vol. 113. Springer, 53–64. DOI:https://doi.org/10.1007/978-3-642-25321-8_5
[] H. Santos, L. Ayres, C. Caminha, and V. Furtado (2012), Open government and citizen participation in law enforcement via crowd mapping. IEEE Intelligent Systems 27 (2012), 63–69. DOI:https://doi.org/10.1109/MIS.2012.80
[] Jörg Schatzmann & René Schäfer & Frederik Eichelbaum (2013), Foresight 2.0 – Definition, overview & evaluation, Eur J Futures Res (2013) 1:15 DOI 10.1007/s40309-013-0015-4
[] Sylvia Ann Hewlett, Melinda Marshall, and Laura Sherbin (2013), How diversity can drive innovation. Harvard Business Review 91, 12 (2013), 30–30
[] Tony Diggle (2013), Water: How collective intelligence initiatives can address this challenge. Foresight 15, 5 (2013), 342–353. DOI:https://doi.org/10.1108/FS-05-2012-0032
[] Hélène Landemore and Jon Elster. 2012. Collective Wisdom: Principles and Mechanisms. Cambridge University Press. DOI:https://doi.org/10.1017/CBO9780511846427
[] Jerome C. Glenn (2013), Collective intelligence and an application by the millennium project. World Futures Review 5, 3 (2013), 235–243. DOI:https://doi.org/10.1177/1946756713497331
[] Detlef Schoder, Peter A. Gloor, and Panagiotis Takis Metaxas (2013), Social media and collective intelligence—Ongoing and future research streams. KI – Künstliche Intelligenz 27, 1 (1 Feb. 2013), 9–15. DOI:https://doi.org/10.1007/s13218-012-0228-x
[] V. Singh, G. Singh, and S. Pande (2013), Emergence, self-organization and collective intelligence—Modeling the dynamics of complex collectives in social and organizational settings. In 2013 UKSim 15th International Conference on Computer Modelling and Simulation. 182–189. DOI:https://doi.org/10.1109/UKSim.2013.77
[] A. Kornrumpf and U. Baumöl (2014), A design science approach to collective intelligence systems. In 2014 47th Hawaii International Conference on System Sciences. 361–370. DOI:https://doi.org/10.1109/HICSS.2014.53
[] Michael A. Peters and Richard Heraud. 2015. Toward a political theory of social innovation: Collective intelligence and the co-creation of social goods. 3, 3 (2015), 7–23. https://researchcommons.waikato.ac.nz/handle/10289/9569
[] Juho Salminen. 2015. The Role of Collective Intelligence in Crowdsourcing Innovation. PhD dissertation. Lappeenranta University of Technology
[] Aelita Skarzauskiene and Monika Maciuliene (2015), Modelling the index of collective intelligence in online community projects. In International Conference on Cyber Warfare and Security. Academic Conferences International Limited, 313
[] AYA H. KIMURA and ABBY KINCHY (2016), Citizen Science: Probing the Virtues and Contexts of Participatory Research, Engaging Science, Technology, and Society 2 (2016), 331-361, DOI:10.17351/ests2016.099
[] Philip Tetlow, Dinesh Garg, Leigh Chase, Mark Mattingley-Scott, Nicholas Bronn, Kugendran Naidoo†, Emil Reinert (2022), Towards a Semantic Information Theory (Introducing Quantum Corollas), arXiv:2201.05478v1 [cs.IT] 14 Jan 2022, 28 pages
[] Melanie Mitchell, What Does It Mean to Align AI With Human Values?, quanta magazin, Quantized Columns, 19.Devember 2022, https://www.quantamagazine.org/what-does-it-mean-to-align-ai-with-human-values-20221213#
Comment by Gerd Doeben-Henisch:
[] Nick Bostrom. Superintelligence. Paths, Dangers, Strategies. Oxford University Press, Oxford (UK), 1 edition, 2014.
[] Scott Aaronson, Reform AI Alignment, Update: 22.November 2022, https://scottaaronson.blog/?p=6821
[] Andrew Y. Ng, Stuart J. Russell, Algorithms for Inverse Reinforcement Learning, ICML 2000: Proceedings of the Seventeenth International Conference on Machine LearningJune 2000 Pages 663–670
[] Pat Langley (ed.), ICML ’00: Proceedings of the Seventeenth International Conference on Machine Learning, Morgan Kaufmann Publishers Inc., 340 Pine Street, Sixth Floor, San Francisco, CA, United States, Conference 29 June 2000- 2 July 2000, 29.June 2000
Abstract: Extrapolating Beyond Suboptimal Demonstrations via Inverse Reinforcement Learning from Observations Daniel S. Brown * 1 Wonjoon Goo * 1 Prabhat Nagarajan 2 Scott Niekum 1 You can read in the abstract: “A critical flaw of existing inverse reinforcement learning (IRL) methods is their inability to significantly outperform the demonstrator. This is because IRL typically seeks a reward function that makes the demonstrator appear near-optimal, rather than inferring the underlying intentions of the demonstrator that may have been poorly executed in practice. In this paper, we introduce a novel reward-learning-from-observation algorithm, Trajectory-ranked Reward EXtrapolation (T-REX), that extrapolates beyond a set of (ap- proximately) ranked demonstrations in order to infer high-quality reward functions from a set of potentially poor demonstrations. When combined with deep reinforcement learning, T-REX outperforms state-of-the-art imitation learning and IRL methods on multiple Atari and MuJoCo bench- mark tasks and achieves performance that is often more than twice the performance of the best demonstration. We also demonstrate that T-REX is robust to ranking noise and can accurately extrapolate intention by simply watching a learner noisily improve at a task over time.”
In the abstract you can read: “For sophisticated reinforcement learning (RL) systems to interact usefully with real-world environments, we need to communicate complex goals to these systems. In this work, we explore goals defined in terms of (non-expert) human preferences between pairs of trajectory segments. We show that this approach can effectively solve complex RL tasks without access to the reward function, including Atari games and simulated robot locomotion, while providing feedback on less than one percent of our agent’s interactions with the environment. This reduces the cost of human oversight far enough that it can be practically applied to state-of-the-art RL systems. To demonstrate the flexibility of our approach, we show that we can successfully train complex novel behaviors with about an hour of human time. These behaviors and environments are considerably more complex than any that have been previously learned from human feedback.
In the abstract you can read: “Conceptual abstraction and analogy-making are key abilities underlying humans’ abilities to learn, reason, and robustly adapt their knowledge to new domains. Despite of a long history of research on constructing AI systems with these abilities, no current AI system is anywhere close to a capability of forming humanlike abstractions or analogies. This paper reviews the advantages and limitations of several approaches toward this goal, including symbolic methods, deep learning, and probabilistic program induction. The paper concludes with several proposals for designing challenge tasks and evaluation measures in order to make quantifiable and generalizable progress
In the abstract you can read: “Since its beginning in the 1950s, the field of artificial intelligence has cycled several times between periods of optimistic predictions and massive investment (“AI spring”) and periods of disappointment, loss of confidence, and reduced funding (“AI winter”). Even with today’s seemingly fast pace of AI breakthroughs, the development of long-promised technologies such as self-driving cars, housekeeping robots, and conversational companions has turned out to be much harder than many people expected. One reason for these repeating cycles is our limited understanding of the nature and complexity of intelligence itself. In this paper I describe four fallacies in common assumptions made by AI researchers, which can lead to overconfident predictions about the field. I conclude by discussing the open questions spurred by these fallacies, including the age-old challenge of imbuing machines with humanlike common sense.”
[] Stuart Russell, (2019), Human Compatible: AI and the Problem of Control, Penguin books, Allen Lane; 1. Edition (8. Oktober 2019)
In the preface you can read: “This book is about the past , present , and future of our attempt to understand and create intelligence . This matters , not because AI is rapidly becoming a pervasive aspect of the present but because it is the dominant technology of the future . The world’s great powers are waking up to this fact , and the world’s largest corporations have known it for some time . We cannot predict exactly how the technology will develop or on what timeline . Nevertheless , we must plan for the possibility that machines will far exceed the human capacity for decision making in the real world . What then ? Everything civilization has to offer is the product of our intelligence ; gaining access to considerably greater intelligence would be the biggest event in human history . The purpose of the book is to explain why it might be the last event in human history and how to make sure that it is not .”
[] David Adkins, Bilal Alsallakh, Adeel Cheema, Narine Kokhlikyan, Emily McReynolds, Pushkar Mishra, Chavez Procope, Jeremy Sawruk, Erin Wang, Polina Zvyagina, (2022), Method Cards for Prescriptive Machine-Learning Transparency, 2022 IEEE/ACM 1st International Conference on AI Engineering – Software Engineering for AI (CAIN), CAIN’22, May 16–24, 2022, Pittsburgh, PA, USA, pp. 90 – 100, Association for Computing Machinery, ACM ISBN 978-1-4503-9275-4/22/05, New York, NY, USA, https://doi.org/10.1145/3522664.3528600
In the abstract you can read: “Specialized documentation techniques have been developed to communicate key facts about machine-learning (ML) systems and the datasets and models they rely on. Techniques such as Datasheets, AI FactSheets, and Model Cards have taken a mainly descriptive approach, providing various details about the system components. While the above information is essential for product developers and external experts to assess whether the ML system meets their requirements, other stakeholders might find it less actionable. In particular, ML engineers need guidance on how to mitigate po- tential shortcomings in order to fix bugs or improve the system’s performance. We propose a documentation artifact that aims to provide such guidance in a prescriptive way. Our proposal, called Method Cards, aims to increase the transparency and reproducibil- ity of ML systems by allowing stakeholders to reproduce the models, understand the rationale behind their designs, and introduce adap- tations in an informed way. We showcase our proposal with an example in small object detection, and demonstrate how Method Cards can communicate key considerations that help increase the transparency and reproducibility of the detection model. We fur- ther highlight avenues for improving the user experience of ML engineers based on Method Cards.”
[] John H. Miller, (2022), Ex Machina: Coevolving Machines and the Origins of the Social Universe, The SFI Press Scholars Series, 410 pages Paperback ISBN: 978-1947864429 , DOI: 10.37911/9781947864429
In the announcement of the book you can read: “If we could rewind the tape of the Earth’s deep history back to the beginning and start the world anew—would social behavior arise yet again? While the study of origins is foundational to many scientific fields, such as physics and biology, it has rarely been pursued in the social sciences. Yet knowledge of something’s origins often gives us new insights into the present. In Ex Machina, John H. Miller introduces a methodology for exploring systems of adaptive, interacting, choice-making agents, and uses this approach to identify conditions sufficient for the emergence of social behavior. Miller combines ideas from biology, computation, game theory, and the social sciences to evolve a set of interacting automata from asocial to social behavior. Readers will learn how systems of simple adaptive agents—seemingly locked into an asocial morass—can be rapidly transformed into a bountiful social world driven only by a series of small evolutionary changes. Such unexpected revolutions by evolution may provide an important clue to the emergence of social life.”
In the abstract you can read: “Analyzing the spatial and temporal properties of information flow with a multi-century perspective could illuminate the sustainability of human resource-use strategies. This paper uses historical and archaeological datasets to assess how spatial, temporal, cognitive, and cultural limitations impact the generation and flow of information about ecosystems within past societies, and thus lead to tradeoffs in sustainable practices. While it is well understood that conflicting priorities can inhibit successful outcomes, case studies from Eastern Polynesia, the North Atlantic, and the American Southwest suggest that imperfect information can also be a major impediment to sustainability. We formally develop a conceptual model of Environmental Information Flow and Perception (EnIFPe) to examine the scale of information flow to a society and the quality of the information needed to promote sustainable coupled natural-human systems. In our case studies, we assess key aspects of information flow by focusing on food web relationships and nutrient flows in socio-ecological systems, as well as the life cycles, population dynamics, and seasonal rhythms of organisms, the patterns and timing of species’ migration, and the trajectories of human-induced environmental change. We argue that the spatial and temporal dimensions of human environments shape society’s ability to wield information, while acknowledging that varied cultural factors also focus a society’s ability to act on such information. Our analyses demonstrate the analytical importance of completed experiments from the past, and their utility for contemporary debates concerning managing imperfect information and addressing conflicting priorities in modern environmental management and resource use.”
Integrating Engineering and the Human Factor (info@uffmm.org) eJournal uffmm.org ISSN 2567-6458, February 27-March 16, 2021,
Author: Gerd Doeben-Henisch
Email: gerd@doeben-henisch.de
Before one starts the HMI analysis some stakeholder — in our case are the users stakeholder as well as users in one role — have to present some given situation — classifiable as a ‘problem’ — to depart from and a vision as the envisioned goal to be realized.
Here we give a short description of the problem for the CM:MI paradigm and the vision, what should be gained.
Problem: Mankind on the Planet Earth
In this project the mankind on the planet earth is understood as the primary problem. ‘Mankind’ is seen here as the life form called homo sapiens. Based on the findings of biological evolution one can state that the homo sapiens has — besides many other wonderful capabilities — at least two extraordinary capabilities:
Outside to Inside
The whole body with the brain is able to convert continuously body-external events into internal, neural events. And the brain inside the body receives many events inside the body as external events too. Thus in the brain we can observe a mixup of body-external (outside 1) and body-internal events (outside 2), realized as set of billions of neural processes, highly interrelated. Most of these neural processes are unconscious, a small part is conscious. Nevertheless these unconscious and conscious events are neurally interrelated. This overall conversion from outside 1 and outside 2 into neural processes can be seen as a mapping. As we know today from biology, psychology and brain sciences this mapping is not a 1-1 mapping. The brain does all the time a kind of filtering — mostly unconscious — sorting out only those events which are judged by the brain to be important. Furthermore the brain is time-slicing all its sensory inputs, storing these time-slices (called ‘memories’), whereby these time-slices again are no 1-1 copies. The storing of time-sclices is a complex (unconscious) process with many kinds of operations like structuring, associating, abstracting, evaluating, and more. From this one can deduce that the content of an individual brain and the surrounding reality of the own body as well as the world outside the own body can be highly different. All kinds of perceived and stored neural events which can be or can become conscious are here called conscious cognitive substrates or cognitive objects.
Inside to Outside (to Inside)
Generally it is known that the homo sapiens can produce with its body events which have some impact on the world outside the body. One kind of such events is the production of all kinds of movements, including gestures, running, grasping with hands, painting, writing as well as sounds by his voice. What is of special interest here are forms of communications between different humans, and even more specially those communications enabled by the spoken sounds of a language as well as the written signs of a language. Spoken sounds as well as written signs are here called expressions associated with a known language. Expressions as such have no meaning (A non-speaker of a language L can hear or see expressions of the language L but he/she/x never will understand anything). But as everyday experience shows nearly every child starts very soon to learn which kinds of expressions belong to a language and with what kinds of shared experiences they can be associated. This learning is related to many complex neural processes which map expressions internally onto — conscious and unconscious — cognitive objects (including expressions!). This mapping builds up an internal meaning function from expressions into cognitive objects and vice versa. Because expressions have a dual face (being internal neural structures as well as being body-outside events by conversions from the inside to body-outside) it is possible that a homo sapiens can transmit its internal encoding of cognitive objects into expressions from his inside to the outside and thereby another homo sapiens can perceive the produced outside expression and can map this outside expression into an intern expression. As far as the meaning function of of the receiving homo sapiens is sufficiently similar to the meaning function of the sending homo sapiens there exists some probability that the receiving homo sapiens can activate from its memory cognitive objects which have some similarity with those of the sending homo sapiens.
Although we know today of different kinds of animals having some form of language, there is no species known which is with regard to language comparable to the homo sapiens. This explains to a large extend why the homo sapiens population was able to cooperate in a way, which not only can include many persons but also can stretch through long periods of time and can include highly complex cognitive objects and associated behavior.
Negative Complexity
In 2006 I introduced the term negative complexity in my writings to describe the fact that in the world surrounding an individual person there is an amount of language-encoded meaning available which is beyond the capacity of an individual brain to be processed. Thus whatever kind of experience or knowledge is accumulated in libraries and data bases, if the negative complexity is higher and higher than this knowledge can no longer help individual persons, whole groups, whole populations in a constructive usage of all this. What happens is that the intended well structured ‘sound’ of knowledge is turned into a noisy environment which crashes all kinds of intended structures into nothing or badly deformed somethings.
Entangled Humans
From Quantum Mechanics we know the idea of entangled states. But we must not dig into quantum mechanics to find other phenomena which manifest entangled states. Look around in your everyday world. There exist many occasions where a human person is acting in a situation, but the bodily separateness is a fake. While sitting before a laptop in a room the person is communicating within an online session with other persons. And depending from the social role and the membership in some social institution and being part of some project this person will talk, perceive, feel, decide etc. with regard to the known rules of these social environments which are represented as cognitive objects in its brain. Thus by knowledge, by cognition, the individual person is in its situation completely entangled with other persons which know from these roles and rules and following thereby in their behavior these rules too. Sitting with the body in a certain physical location somewhere on the planet does not matter in this moment. The primary reality is this cognitive space in the brains of the participating persons.
If you continue looking around in your everyday world you will probably detect that the everyday world is full of different kinds of cognitively induced entangled states of persons. These internalized structures are functioning like protocols, like scripts, like rules in a game, telling everybody what is expected from him/her/x, and to that extend, that people adhere to such internalized protocols, the daily life has some structure, has some stability, enables planning of behavior where cooperation between different persons is necessary. In a cognitively enabled entangled state the individual person becomes a member of something greater, becoming a super person. Entangled persons can do things which usually are not possible as long you are working as a pure individual person.[1]
Entangled Humans and Negative Complexity
Although entangled human persons can principally enable more complex events, structures, processes, engineering, cultural work than single persons, human entanglement is still limited by the brain capacities as well as by the limits of normal communication. Increasing the amount of meaning relevant artifacts or increasing the velocity of communication events makes things even more worse. There are objective limits for human processing, which can run into negative complexity.
Future is not Waiting
The term ‘future‘ is cognitively empty: there exists nowhere an object which can be called ‘future’. What we have is some local actual presence (the Now), which the body is turning into internal representations of some kind (becoming the Past), but something like a future does not exist, nowhere. Our knowledge about the future is radically zero.
Nevertheless, because our bodies are part of a physical world (planet, solar system, …) and our entangled scientific work has identified some regularities of this physical world which can be bused for some predictions what could happen with some probability as assumed states where our clocks are showing a different time stamp. But because there are many processes running in parallel, composed of billions of parameters which can be tuned in many directions, a really good forecast is not simple and depends from so many presuppositions.
Since the appearance of homo sapiens some hundred thousands years ago in Africa the homo sapiens became a game changer which makes all computations nearly impossible. Not in the beginning of the appearance of the homo sapiens, but in the course of time homo sapiens enlarged its number, improved its skills in more and more areas, and meanwhile we know, that homo sapiens indeed has started to crash more and more the conditions of its own life. And principally thinking points out, that homo sapiens could even crash more than only planet earth. Every exemplar of a homo sapiens has a built-in freedom which allows every time to decide to behave in a different way (although in everyday life we are mostly following some protocols). And this built-in freedom is guided by actual knowledge, by emotions, and by available resources. The same child can become a great musician, a great mathematician, a philosopher, a great political leader, an engineer, … but giving the child no resources, depriving it from important social contexts, giving it the wrong knowledge, it can not manifest its freedom in full richness. As human population we need the best out of all children.
Because the processing of the planet, the solar system etc. is going on, we are in need of good forecasts of possible futures, beyond our classical concepts of sharing knowledge. This is where our vision enters.
VISION: DEVELOPING TOGETHER POSSIBLE FUTURES
To find possible and reliable shapes of possible futures we have to exploit all experiences, all knowledge, all ideas, all kinds of creativity by using maximal diversity. Because present knowledge can be false — as history tells us –, we should not rule out all those ideas, which seem to be too crazy at a first glance. Real innovations are always different to what we are used to at that time. Thus the following text is a first rough outline of the vision:
Find a format
which allows anykinds of people
for any kind of given problem
with at least one vision of a possible improvement
together
to search and to find a path leading from the given problem (Now) to the envisioned improved state (future).
For all needed communication any kind of everyday language should be enough.
As needed this everyday language should be extendable with special expressions.
These considerations about possible paths into the wanted envisioned future state should continuously be supported by appropriate automaticsimulations of such a path.
These simulations should include automatic evaluations based on the given envisioned state.
As far as possible adaptive algorithms should be available to support the search, finding and identification of the best cases (referenced by the visions) within human planning.
REFERENCES or COMMENTS
[1] One of the most common entangled state in daily life is the usage of normal language! A normal language L works only because the rules of usage of this language L are shared by all speaker-hearer of this language, and these rules are explicit cognitive structures (not necessarily conscious, mostly unconscious!).
The analysis of the main application scenario revealed that classical
logical inference concepts are insufficient for the assistance of human ac-
tors during shared planning. It turned out that the simulator has to be
understood as a real learning artificial actor which has to gain the required
knowledge during the process.
In this section several case studies will be presented. It will be shown, how the DAAI paradigm can be applied to many different contexts . Since the original version of the DAAI-Theory in Jan 18, 2020 the concept has been further developed centering around the concept of a Collective Man-Machine Intelligence [CM:MI] to address now any kinds of experts for any kind of simulation-based development, testing and gaming. Additionally the concept now can be associated with any kind of embedded algorithmic intelligence [EAI] (different to the mainstream concept ‘artificial intelligence’). The new concept can be used with every normal language; no need for any special programming language! Go back to the overall framework.
COLLECTION OF PAPERS
There exists only a loosely order between the different papers due to the character of this elaboration process: generally this is an experimental philosophical process. HMI Analysis applied for the CM:MI paradigm.
FROM DAAI to GCA. Turning Engineering into Generative Cultural Anthropology. This paper gives an outline how one can map the DAAI paradigm directly into the GCA paradigm (April-19,2020): case1-daai-gca-v1
A first GCA open research project [GCA-OR No.1]. This paper outlines a first open research project using the GCA. This will be the framework for the first implementations (May-5, 2020): GCAOR-v0-1
Engineering and Society. A Case Study for the DAAI Paradigm – Introduction. This paper illustrates important aspects of a cultural process looking to the acting actors where certain groups of people (experts of different kinds) can realize the generation, the exploration, and the testing of dynamical models as part of a surrounding society. Engineering is clearly not separated from society (April-9, 2020): case1-population-start-part0-v1
Bootstrapping some Citizens. This paper clarifies the set of general assumptions which can and which should be presupposed for every kind of a real world dynamical model (April-4, 2020): case1-population-start-v1-1
Hybrid Simulation Game Environment [HSGE]. This paper outlines the simulation environment by combing a usual web-conference tool with an interactive web-page by our own (23.May 2020): HSGE-v2 (May-5, 2020): HSGE-v0-1
The Observer-World Framework. This paper describes the foundations of any kind of observer-based modeling or theory construction.(July 16, 2020)
Who has followed the discussion in this blog remembers several different phases in the conceptual frameworks used here.
The first paradigm called Human-Computer Interface (HCI) has been only mentioned by historical reasons. The next phase Human-Machine Interaction (HMI) was the main paradigm in the beginning of my lecturing in 2005. Later, somewhere 2011/2012, I switched to the paradigm Actor-Actor Interaction (AAI) because I tried to generalize over the different participating machines, robots, smart interfaces, humans as well as animals. This worked quite nice and some time I thought that this is now the final formula. But reality is often different compared to our thinking. Many occasions showed up where the generalization beyond the human actor seemed to hide the real processes which are going on, especially I got the impression that very important factors rooted in the special human actor became invisible although they are playing decisive role in many processes. Another punch against the AAI view came from application scenarios during the last year when I started to deal with whole cities as actors. At the end I got the feeling that the more specialized expressions like Actor-Cognition Interaction (ACI) or Augmented Collective Intelligence (ACI) can indeed help to stress certain special properties better than the more abstract AAI acronym, but using structures like ACI within general theories and within complex computing environments it became clear that the more abstract acronym AAI is in the end more versatile and simplifies the general structures. ACI became a special sub-case
HISTORY
To understand this oscillation between AAI and ACI one has to look back into the history of Human Computer/ Machine Interaction, but not only until the end of the World War II, but into the more extended evolutionary history of mankind on this planet.
It is a widespread opinion under the researchers that the development of tools to help mastering material processes was one of the outstanding events which changed the path of the evolution a lot. A next step was the development of tools to support human cognition like scripture, numbers, mathematics, books, libraries etc. In this last case of cognitive tools the material of the cognitive tools was not the primary subject the processes but the cognitive contents, structures, even processes encoded by the material structures of the tools.
Only slowly mankind understood how the cognitive abilities and capabilities are rooted in the body, in the brain, and that the brain represents a rather complex biological machinery which enables a huge amount of cognitive functions, often interacting with each other; these cognitive functions show in the light of observable behavior clear limits with regard to the amount of features which can be processed in some time interval, with regard to precision, with regard to working interconnections, and more. And therefore it has been understood that the different kinds of cognitive tools are very important to support human thinking and to enforce it in some ways.
Only in the 20th century mankind was able to built a cognitive tool called computer which could show capabilities which resembled some human cognitive capabilities and which even surpassed human capabilities in some limited areas. Since then these machines have developed a lot (not by themselves but by the thinking and the engineering of humans!) and meanwhile the number and variety of capabilities where the computer seems to resemble a human person or surpasses human capabilities have extend in a way that it has become a common slang to talk about intelligent machines or smart devices.
While the original intention for the development of computers was to improve the cognitive tools with the intend to support human beings one can get today the impression as if the computer has turned into a goal on its own: the intelligent and then — as supposed — the super-intelligent computer appears now as the primary goal and mankind appears as some old relic which has to be surpassed soon.
As will be shown later in this text this vision of the computer surpassing mankind has some assumptions which are
What seems possible and what seems to be a promising roadmap into the future is a continuous step-wise enhancement of the biological structure of mankind which absorbs the modern computing technology by new cognitive interfaces which in turn presuppose new types of physical interfaces.
To give a precise definition of these new upcoming structures and functions is not yet possible, but to identify the actual driving factors as well as the exciting combinations of factors seems possible.
COGNITION EMBEDDED IN MATTER
Cognition within the Actor-Actor Interaction (AAI) paradigm: A simple outline of the whole paradigm
The main idea is the shift of the focus away from the physical grounding of the interaction between actors looking instead more to the cognitive contents and processes, which shall be mediated by the physical conditions. Clearly the analysis of the physical conditions as well as the optimal design of these physical conditions is still a challenge and a task, but without a clear knowledge manifested in a clear model about the intended cognitive contents and processes one has not enough knowledge for the design of the physical layout.
SOLVING A PROBLEM
Thus the starting point of an engineering process is a group of people (the stakeholders (SH)) which identify some problem (P) in their environment and which have some minimal idea of a possible solution (S) for this problem. This can be commented by some non-functional requirements (NFRs) articulating some more general properties which shall hold through the whole solution (e.g. ‘being save’, ‘being barrier-free’, ‘being real-time’ etc.). If the description of the problem with a first intended solution including the NFRs contains at least one task (T) to be solved, minimal intended users (U) (here called executive actors (eA)), minimal intended assistive actors (aA) to assist the user in doing the task, as well as a description of the environment of the task to do, then the minimal ACI-Check can be passed and the ACI analysis process can be started.
COGNITION AND AUGMENTED COLLECTIVE INTELLIGENCE
If we talk about cognition then we think usually about cognitive processes in an individual person. But in the real world there is no cognition without an ongoing exchange between different individuals by communicative acts. Furthermore it has to be taken into account that the cognition of an individual person is in itself partitioned into two unequal parts: the unconscious part which covers about 99% of all the processes in the body and in the brain and about 1% which covers the conscious part. That an individual person can think somehow something this person has to trigger his own unconsciousness by stimuli to respond with some messages from his before unknown knowledge. Thus even an individual person alone has to organize a communication with his own unconsciousness to be able to have some conscious knowledge about its own unconscious knowledge. And because no individual person has at a certain point of time a clear knowledge of his unconscious knowledge the person even does not really know what to look for — if there is no event, not perception, no question and the like which triggers the person to interact with its unconscious knowledge (and experience) to get some messages from this unconscious machinery, which — as it seems — is working all the time.
On account of this logic of the individual internal communication with the individual cognition an external communication with the world and the manifested cognition of other persons appears as a possible enrichment in the interactions with the distributed knowledge in the different persons. While in the following approach it is assumed to represent the different knowledge responses in a common symbolic representation viewable (and hearable) from all participating persons it is growing up a possible picture of something which is generally more rich, having more facets than a picture generated by an individual person alone. Furthermore can such a procedure help all participants to synchronize their different knowledge fragments in a bigger picture and use it further on as their own picture, which in turn can trigger even more aspects out of the distributed unconscious knowledge.
If one organizes this collective triggering of distributed unconscious knowledge within a communication process not only by static symbolic models but beyond this with dynamic rules for changes, which can be interactively simulated or even played with defined states of interest then the effect of expanding the explicit and shared knowledge will be boosted even more.
From this background it makes some sense to turn the wording Actor-Cognition Interaction into the wording Augmented Collective Intelligence where Intelligence is the component of dynamic cognition in a system — here a human person –, Collective means that different individual person are sharing their unconscious knowledge by communicative interactions, and Augmented can be interpreted that one enhances, extends this sharing of knowledge by using new tools of modeling, simulation and gaming, which expands and intensifies the individual learning as well as the commonly shared opinions. For nearly all problems today this appears to be absolutely necessary.
ACI ANALYSIS PROCESS
Here it will be assumed that there exists a group of ACI experts which can supervise other actors (stakeholders, domain experts, …) in a process to analyze the problem P with the explicit goal of finding a satisfying solution (S+).
For the whole ACI analysis process an appropriate ACI software should be available to support the ACI experts as well as all the other domain experts.
In this ACI analysis process one can distinguish two main phases: (1) Construct an actor story (AS) which describes all intended states and intended changes within the actor story. (2) Make several tests of the actor story to exploit their explanatory power.
ACTOR STORY (AS)
The actor story describes all possible states (S) of the tasks (T) to be realized to reach intended goal states (S+). A mapping from one state to a follow-up state will be described by a change rule (X). Thus having start state (S0) and appropriate change rules one can construct the follow-up states from the actual state (S*) with the aid of the change rules. Formally this computation of the follow-up state (S’) will be computed by a simulator function (σ), written as: σ: S* x X —> S.
SEVERAL TESTS
With the aid of an explicit actor story (AS) one can define the non-functional requirements (NFRs) in a way that it will become decidable whether a NFR is valid with regard to an actor story or not. In this case this test of being valid can be done as an automated verification process (AVP). Part of this test paradigm is the so-called oracle function (OF) where one can pose a question to the system and the system will answer the question with regard to all theoretically possible states without the necessity to run a (passive) simulation.
If the size of the group is large and it is important that all members of the group have a sufficient similar knowledge about the problem(s) in question (as it is the usual case in a city with different kinds of citizens) then is can be very helpful to enable interactive simulations or even games, which allow a more direct experience of the possible states and changes. Furthermore, because the participants can act according to their individual reflections and goals the process becomes highly uncertain and nearly unpredictable. Especially for these highly unpredictable processes can interactive simulations (and games) help to improve a common understanding of the involved factors and their effects. The difference between a normal interactive simulation and a game is given in the fact that a game has explicit win-states whereas the interactive simulations doesn’t. Explicit win-states can improve learning a lot.
The other interesting question is whether an actor story AS with a certain idea for an assistive actor (aA) is usable for the executive actors. This requires explicit measurements of the usability which in turn requires a clear norm of reference with which the behavior of an executive actor (eA) during a process can be compared. Usually is the actor Story as such the norm of reference with which the observable behavior of the executing actors will be compared. Thus for the measurement one needs real executive actors which represent the intended executive actors and one needs a physical realization of the intended assistive actors called mock-up. A mock-up is not yet the final implementation of the intended assistive actor but a physical entity which can show all important physical properties of the intended assistive actor in a way which allows a real test run. While in the past it has been assumed to be sufficient to test a test person only once it is here assumed that a test person has to be tested at least three times. This follows from the assumption that every executive (biological) actor is inherently a learning system. This implies that the test person will behave differently in different tests. The degree of changes can be a hint of the easiness and the learnability of the assistive actor.
COLLECTIVE MEMORY
If an appropriate ACI software is available then one can consider an actor story as a simple theory (ST) embracing a model (M) and a collection of rules (R) — ST(x) iff x = <M,R> –which can be used as a kind of a building block which in turn can be combined with other such building blocks resulting in a complex network of simple theories. If these simple theories are stored in a public available data base (like a library of theories) then one can built up in time a large knowledge base on their own.
This suggests that a symbiosis between creative humans and computing algorithms is an attractive pairing. For this we have to re-invent our official learning processes in schools and universities to train the next generation of humans in a more inspired and creative usage of algorithms in a game-like learning processes.
CONTEXT
The overall context is given by the description of the Actor-Actor Interaction (AAI) paradigm as a whole. In this text the special relationship between engineering and the surrounding society is in the focus. And within this very broad and rich relationship the main interest lies in the ethical dimension here understood as those preferences of a society which are more supported than others. It is assumed that such preferences manifesting themselves in real actions within a space of many other options are pointing to hidden values which guide the decisions of the members of a society. Thus values are hypothetical constructs based on observable actions within a cognitively assumed space of possible alternatives. These cognitively represented possibilities are usually only given in a mixture of explicitly stated symbolic statements and different unconscious factors which are influencing the decisions which are causing the observable actions.
These assumptions represent until today not a common opinion and are not condensed in some theoretical text. Nevertheless I am using these assumptions here because they help to shed some light on the rather complex process of finding a real solution to a stated problem which is rooted in the cognitive space of the participants of the engineering process. To work with these assumptions in concrete development processes can support a further clarification of all these concepts.
ENGINEERING AND SOCIETY
DUAL: REAL AND COGNITIVE
The relationship between an engineering process and the preferences of a society
As assumed in the AAI paradigm the engineering process is that process which connects the event of stating aproblem combined with a first vision of a solution with a final concrete working solution.
The main characteristic of such an engineering process is the dual character of a continuous interaction between the cognitive space of all participants of the process with real world objects, actions, and processes. The real world as such is a lose collection of real things, to some extend connected by regularities inherent in natural things, but the visions of possible states, possible different connections, possible new processes is bound to the cognitive space of biological actors, especially to humans as exemplars of the homo sapiens species.
Thus it is a major factor of training, learning, and education in general to see how the real world can be mappedinto some cognitive structures, how the cognitive structures can be transformed by cognitive operations into new structures and how these new cognitive structures can be re-mapped into the real world of bodies.
Within the cognitive dimension exists nearly infinite sets of possible alternatives, which all indicate possible states of a world, whose feasibility is more or less convincing. Limited by time and resources it is usually not possible to explore all these cognitively tapped spaces whether and how they work, what are possible side effects etc.
PREFERENCES
Somehow by nature, somehow by past experience biological system — like the home sapiens — have developed cultural procedures to induce preferences how one selects possible options, which one should be selected, under which circumstances and with even more constraints. In some situations these preferences can be helpful, in others they can hide possibilities which afterwards can be re-detected as being very valuable.
Thus every engineering process which starts a transformation process from some cognitively given point of view to a new cognitively point of view with a following up translation into some real thing is sharing its cognitive spacewith possible preferences of the cognitive space of the surrounding society.
It is an open case whether the engineers as the experts have an experimental, creative attitude to explore without dogmatic constraints the possible cognitive spaces to find new solutions which can improve life or not. If one assumes that there exist no absolute preferences on account of the substantially limit knowledge of mankind at every point of time and inferring from this fact the necessity to extend an actual knowledge further to enable the mastering of an open unknown future then the engineers will try to explore seriously all possibilities without constraints to extend the power of engineering deeper into the heart of the known as well as unknown universe.
EXPLORING COGNITIVE POSSIBILITIES
At the start one has only a rough description of the problem and a rough vision of a wanted solution which gives some direction for the search of an optimal solution. This direction represents also a kind of a preference what is wanted as the outcome of the process.
On account of the inherent duality of human thinking and communication embracing the cognitive space as well as the realm of real things which both are connected by complex mappings realized by the brain which operates nearly completely unconscious a long process of concrete real and cognitive actions is necessary to materialize cognitive realities within a communication process. Main modes of materialization are the usage of symbolic languages, paintings (diagrams), physical models, algorithms for computation and simulations, and especially gaming (in several different modes).
As everybody can know these communication processes are not simple, can be a source of confusions, and the coordination of different brains with different cognitive spaces as well as different layouts of unconscious factors is a difficult and very demanding endeavor.
The communication mode gaming is of a special interest here because it is one of the oldest and most natural modes to learn but in the official education processes in schools and universities (and in companies) it was until recently not part of the official curricula. But it is the only mode where one can exercise the dimensions of preferences explicitly in combination with an exploring process and — if one wants — with the explicit social dimension of having more than one brain involved.
In the last about 50 – 100 years the term project has gained more and more acceptance and indeed the organization of projects resembles a game but it is usually handled as a hierarchical, constraints-driven process where creativity and concurrent developing (= gaming) is not a main topic. Even if companies allow concurrent development teams these teams are cognitively separated and the implicit cognitive structures are black boxes which can not be evaluated as such.
In the presupposed AAI paradigm here the open creative space has a high priority to increase the chance for innovation. Innovation is the most valuable property in face of an unknown future!
While the open space for a real creativity has to be executed in all the mentioned modes of communication the final gaming mode is of special importance. To enable a gaming process one has explicitly to define explicit win-lose states. This objectifies values/ preferences hidden in the cognitive space before. Such an objectification makes things transparent, enables more rationality and allows the explicit testing of these defined win-lose states as feasible or not. Only tested hypothesis represent tested empirical knowledge. And because in a gaming mode whole groups or even all members of a social network can participate in a learning process of the functioning and possible outcome of a presented solution everybody can be included. This implies a common sharing of experience and knowledge which simplifies the communication and therefore the coordination of the different brains with their unconsciousness a lot.
TESTING AND EVALUATION
Testing a proposed solution is another expression for measuring the solution. Measuring is understood here as a basic comparison between the target to be measured (here the proposed solution) and the before agreednorm which shall be used as point of reference for the comparison.
But what can be a before agreed norm?
Some aspects can be mentioned here:
First of all there is the proposed solution as such, which is here a proposal for a possible assistive actor in an assumed environment for some intended executive actors which has to fulfill some job (task).
Part of this proposed solution are given constraints and non-functional requirements.
Part of this proposed solution are some preferences as win-lose states which have to be reached.
Another difficult to define factor are the executive actors if they are biological systems. Biological systems with their basic built in ability to act free, to be learning systems, and this associated with a not-definable large unconscious realm.
Given the explicit preferences constrained by many assumptions one can test only, whether the invited test persons understood as possible instances of the intended executive actors are able to fulfill the defined task(s) in some predefined amount of time within an allowed threshold of making errors with an expected percentage of solved sub-tasks together with a sufficient subjective satisfaction with the whole process.
But because biological executive actors are learning systems they will behave in different repeated tests differently, they can furthermore change their motivations and their interests, they can change their emotional commitment, and because of their built-in basic freedom to act there can be no 100% probability that they will act at time t as they have acted all the time before.
Thus for all kinds of jobs where the process is more or less fixed, where nothing new will happen, the participation of biological executive actors in such a process is questionable. It seems (hypothesis), that biological executing actors are better placed in jobs where there is some minimal rate of curiosity, of innovation, and of creativity combined with learning.
If this hypothesis is empirically sound (as it seems), then all jobs where human persons are involved should have more the character of games then something else.
It is an interesting side note that the actual research in robotics under the label of developmental robotics is struck by the problem how one can make robots continuously learning following interesting preferences. Given a preference an algorithm can work — under certain circumstances — often better than a human person to find an optimal solution, but lacking such a preference the algorithm is lost. And actually there exists not the faintest idea how algorithms should acquire that kind of preferences which are interesting and important for an unknown future.
On the contrary, humans are known to be creative, innovative, detecting new preferences etc. but they have only limited capacities to explore these creative findings until some telling endpoint.
This suggests that a symbiosis between creative humans and computing algorithms is an attractive pairing. For this we have to re-invent our official learning processes in schools and universities to train the next generation of humans in a more inspired and creative usage of algorithms in a game-like learning processes.
Within the AAI paradigm the following steps will usually be distinguished:
A given problem and a wanted solution.
An assumed context and intended executing and assisting actors.
Assumed non-functional requirements (NFRs).
An actor story (AS) describing at least one task including all the functional requirements.
An usability test, often enhanced with passive or interactive simulations.
An evaluation of the test.
Some repeated improvements.
With these elements one can analyze and design the behavior surface of an assistive actor which can approach the requirements of the stakeholder.
SIMULATION AND GAMING
Comparing these elements with a (computer) game then one can detect immediately that a game characteristically allows to win or to lose. The possible win-states or lose-states stop a game. Often the winning state includes additionally some measures how ‘strong’ or how ‘big’ someone has won or lost a game.
Thus in a game one has besides the rules of the game R which determine what is allowed to do in a game some set of valuelables V which indicate some property, some object, some state as associated with some value v, optionally associated further with some numbers to quantify the value between a maximum and a minimum.
In most board games you will reach an end state where you are the winner or the loser independent of some value. In other games one plays as often as necessary to reach some accumulated value which gives a measure who is better than someone else.
Doing AAI analysis as part of engineering it is usually sufficient to develop an assistive actor with a behavior surface which satisfies all requirements and some basic needs of the executive actors (the classical users).
But this newly developed product (the assistive actor for certain tasks) will be part of a social situation with different human actors. In these social situations there are often more requirements, demands, emotions around than only the original design criteria for the technical product.
For some people the aesthetic properties of a technical product can be important or some other cultural code which associates the technical product with these cultural codes making it precious or not.
Furthermore there can be whole processes within which a product can be used or not, making it precious or not.
COLLECTIVE INTELLIGENCE AND AUTOPOIETIC GAMES
In the case of simulations one has already from the beginning a special context given by the experience and the knowledge of the executive actors. In some cases this knowledge is assumed to be stable or closed. Therefore there is no need to think of the assistive actor as a tool which has not only to support the fulfilling of a defined task but additionally to support the development of the knowledge and experience of the executive actor further. But there are social situations in a city, in an institution, in learning in general where the assumed knowledge and experience is neither complete nor stable. On the contrary in these situations there is a strong need to develop the assumed knowledge further and do this as a joined effort to improve the collective intelligence collectively.
If one sees the models and rules underlying a simulation as a kind of a representation of the assumed collective knowledge then a simulation can help to visualize this knowledge, make it an experience, explore its different consequences. And as far as the executive actors are writing the rules of change by themselves, they understand the simulation and they can change the rules to understand better, what can improve the process and possible goal states. This kind of collective development of models and rules as well as testing can be called autopoietic because the executing actors have two roles:(i) following some rules (which they have defined by themselves) they explore what will happen, when one adheres to these rules; (ii) changing the rules to change the possible outcomes.
This procedure establishes some kind of collective learning within an autopoietic process.
If one enriches this setting with explicit goal states, states of assumed advantages, then one can look at this collective learning as a serious pattern of collective learning by autopoietic games.
For many context like cities, educational institutions, and even companies this kind of collective learning by autopoietic games can be a very productive way to develop the collective intelligence of many people at the same time gaining knowledge by having some exciting fun.
Autopoietic gaming as support for collective learning processes
The context for this text is the whole block dedicated to the AAI (Actor-Actor Interaction) paradigm. The aim of this text is to give the big picture of all dimensions and components of this subject as it shows up during April 2019.
The first dimension introduced is the historical dimension, because this allows a first orientation in the course of events which lead to the actual situation. It starts with the early days of real computers in the thirties and forties of the 20 century.
The second dimension is the engineering dimension which describes the special view within which we are looking onto the overall topic of interactions between human persons and computers (or machines or technology or society). We are interested how to transform a given problem into a valuable solution in a methodological sound way called engineering.
The third dimension is the whole of society because engineering happens always as some process within a society. Society provides the resources which can be used and spends the preferences (values) what is understood as ‘valuable’, as ‘good’.
The fourth dimension is Philosophy as that kind of thinking which takes everything into account which can be thought and within thinking Philosophy clarifies conditions of thinking, possible tools of thinking and has to clarify when some symbolic expression becomes true.
HISTORY
In history we are looking back in the course of events. And this looking back is in a first step guided by the concepts of HCI (Human-Computer Interface) and HMI (Human-Machine Interaction).
It is an interesting phenomenon how the original focus of the interface between human persons and the early computers shifted to the more general picture of interaction because the computer as machine developed rapidly on account of the rapid development of the enabling hardware (HW) the enabling software (SW).
Within the general framework of hardware and software the so-called artificial intelligence (AI) developed first as a sub-topic on its own. Since the last 10 – 20 years it became in a way productive that it now seems to become a normal part of every kind of software. Software and smart software seem to be interchangeable. Thus the new wording of augmented or collective intelligence is emerging intending to bridge the possible gap between humans with their human intelligence and machine intelligence. There is some motivation from the side of society not to allow the impression that the smart (intelligent) machines will replace some day the humans. Instead one is propagating the vision of a new collective shape of intelligence where human and machine intelligence allows a symbiosis where each side gives hist best and receives a maximum in a win-win situation.
What is revealing about the actual situation is the fact that the mainstream is always talking about intelligence but not seriously about learning! Intelligence is by its roots a static concept representing some capabilities at a certain point of time, while learning is the more general dynamic concept that a system can change its behavior depending from actual external stimuli as well as internal states. And such a change includes real changes of some of its internal states. Intelligence does not communicate this dynamics! The most demanding aspect of learning is the need for preferences. Without preferences learning is impossible. Today machine learning is a very weak example of learning because the question of preferences is not a real topic there. One assumes that some reward is available, but one does not really investigate this topic. The rare research trying to do this job is stating that there is not the faintest idea around how a general continuous learning could happen. Human society is of no help for this problem while human societies have a clash of many, often opposite, values, and they have no commonly accepted view how to improve this situation.
ENGINEERING
Engineering is the art and the science to transform a given problem into a valuable and working solution. What is valuable decides the surrounding enabling society and this judgment can change during the course of time. Whether some solution is judged to be working can change during the course of time too but the criteria used for this judgment are more stable because of their adherence to concrete capabilities of technical solutions.
While engineering was and is always a kind of an art and needs such aspects like creativity, innovation, intuition etc. it is also and as far as possible a procedure driven by defined methods how to do things, and these methods are as far as possible backed up by scientific theories. The real engineer therefore synthesizes art, technology and science in a unique way which can not completely be learned in the schools.
In the past as well as in the present engineering has to happen in teams of many, often many thousands or even more, people which coordinate their brains by communication which enables in the individual brains some kind of understanding, of emerging world pictures, which in turn guide the perception, the decisions, and the concrete behavior of everybody. And these cognitive processes are embedded — in every individual team member — in mixtures of desires, emotions, as well as motivations, which can support the cognitive processes or obstruct them. Therefore an optimal result can only be reached if the communication serves all necessary cognitive processes and the interactions between the team members enable the necessary constructive desires, emotions, and motivations.
If an engineering process is done by a small group of dedicated experts — usually triggered by the given problem of an individual stakeholder — this can work well for many situations. It has the flavor of a so-called top-down approach. If the engineering deals with states of affairs where different kinds of people, citizens of some town etc. are affected by the results of such a process, the restriction to a small group of experts can become highly counterproductive. In those cases of a widespread interest it seems promising to include representatives of all the involved persons into the executing team to recognize their experiences and their kinds of preferences. This has to be done in a way which is understandable and appreciative, showing esteem for the others. This manner of extending the team of usual experts by situative experts can be termed bottom-up approach. In this usage of the term bottom-up this is not the opposite to top-down but is reflecting the extend in which members of a society are included insofar they are affected by the results of a process.
SOCIETY
Societies in the past and the present occur in a great variety of value systems, organizational structures, systems of power etc. Engineering processes within a society are depending completely on the available resources of a society and of its value systems.
The population dynamics, the needs and wishes of the people, the real territories, the climate, housing, traffic, and many different things are constantly producing demands to be solved if life shall be able and continue during the course of time.
The self-understanding and the self-management of societies is crucial for their ability to used engineering to improve life. This deserves communication and education to a sufficient extend, appropriate public rules of management, otherwise the necessary understanding and the freedom to act is lacking to use engineering in the right way.
PHILOSOPHY
Without communication no common constructive process can happen. Communication happens according to many implicit rules compressed in the formula who when can speak how about what with whom etc. Communication enables cognitive processes of for instance understanding, explanations, lines of arguments. Especially important for survival is the ability to make true descriptions and the ability to decide whether a statement is true or not. Without this basic ability communication will break down, coordination will break down, life will break down.
The basic discipline to clarify the rules and conditions of true communication, of cognition in general, is called Philosophy. All the more modern empirical disciplines are specializations of the general scope of Philosophy and it is Philosophy which integrates all the special disciplines in one, coherent framework (this is the ideal; actually we are far from this ideal).
Thus to describe the process of engineering driven by different kinds of actors which are coordinating themselves by communication is primarily the task of philosophy with all their sub-disciplines.
Thus some of the topics of Philosophy are language, text, theory, verification of a theory, functions within theories as algorithms, computation in general, inferences of true statements from given theories, and the like.
In this text I apply Philosophy as far as necessary. Especially I am introducing a new process model extending the classical systems engineering approach by including the driving actors explicitly in the formal representation of the process. Learning machines are included as standard tools to improve human thinking and communication. You can name this Augmented Social Learning Systems (ASLS). Compared to the wording Augmented Intelligence (AI) (as used for instance by the IBM marketing) the ASLS concept stresses that the primary point of reference are the biological systems which created and create machine intelligence as a new tool to enhance biological intelligence as part of biological learning systems. Compared to the wording Collective Intelligence (CI) (as propagated by the MIT, especially by Thomas W.Malone and colleagues) the spirit of the CI concept seems to be similar, but perhaps only a weak similarity.
Last change: 23.February 2019 (continued the text)
Last change: 24.February 2019 (extended the text)
CONTEXT
In the overview of the AAI paradigm version 2 you can find this section dealing with the philosophical perspective of the AAI paradigm. Enjoy reading (or not, then send a comment :-)).
THE DAILY LIFE PERSPECTIVE
The perspective of Philosophy is rooted in the everyday life perspective. With our body we occur in a space with other bodies and objects; different features, properties are associated with the objects, different kinds of relations an changes from one state to another.
From the empirical sciences we have learned to see more details of the everyday life with regard to detailed structures of matter and biological life, with regard to the long history of the actual world, with regard to many interesting dynamics within the objects, within biological systems, as part of earth, the solar system and much more.
A certain aspect of the empirical view of the world is the fact, that some biological systems called ‘homo sapiens’, which emerged only some 300.000 years ago in Africa, show a special property usually called ‘consciousness’ combined with the ability to ‘communicate by symbolic languages’.
Figure 1: General setting of the homo sapiens species (simplified)
As we know today the consciousness is associated with the brain, which in turn is embedded in the body, which is further embedded in an environment.
Thus those ‘things’ about which we are ‘conscious’ are not ‘directly’ the objects and events of the surrounding real world but the ‘constructions of the brain’ based on actual external and internal sensor inputs as well as already collected ‘knowledge’. To qualify the ‘conscious things’ as ‘different’ from the assumed ‘real things’ ‘outside there’ it is common to speak of these brain-generated virtual things either as ‘qualia’ or — more often — as ‘phenomena’ which are different to the assumed possible real things somewhere ‘out there’.
PHILOSOPHY AS FIRST PERSON VIEW
‘Philosophy’ has many facets. One enters the scene if we are taking the insight into the general virtual character of our primary knowledge to be the primary and irreducible perspective of knowledge. Every other more special kind of knowledge is necessarily a subspace of this primary phenomenological knowledge.
There is already from the beginning a fundamental distinction possible in the realm of conscious phenomena (PH): there are phenomena which can be ‘generated’ by the consciousness ‘itself’ — mostly called ‘by will’ — and those which are occurring and disappearing without a direct influence of the consciousness, which are in a certain basic sense ‘given’ and ‘independent’, which are appearing and disappearing according to ‘their own’. It is common to call these independent phenomena ’empirical phenomena’ which represent a true subset of all phenomena: PH_emp ⊂ PH. Attention: These empirical phenomena’ are still ‘phenomena’, virtual entities generated by the brain inside the brain, not directly controllable ‘by will’.
There is a further basic distinction which differentiates the empirical phenomena into those PH_emp_bdy which are controlled by some processes in the body (being tired, being hungry, having pain, …) and those PH_emp_ext which are controlled by objects and events in the environment beyond the body (light, sounds, temperature, surfaces of objects, …). Both subsets of empirical phenomena are different: PH_emp_bdy ∩ PH_emp_ext = 0. Because phenomena usually are occurring associated with typical other phenomena there are ‘clusters’/ ‘pattern’ of phenomena which ‘represent’ possible events or states.
Modern empirical science has ‘refined’ the concept of an empirical phenomenon by introducing ‘standard objects’ which can be used to ‘compare’ some empirical phenomenon with such an empirical standard object. Thus even when the perception of two different observers possibly differs somehow with regard to a certain empirical phenomenon, the additional comparison with an ’empirical standard object’ which is the ‘same’ for both observers, enhances the quality, improves the precision of the perception of the empirical phenomena.
From these considerations we can derive the following informal definitions:
Something is ‘empirical‘ if it is the ‘real counterpart’ of a phenomenon which can be observed by other persons in my environment too.
Something is ‘standardized empirical‘ if it is empirical and can additionally be associated with a before introduced empirical standard object.
Something is ‘weak empirical‘ if it is the ‘real counterpart’ of a phenomenon which can potentially be observed by other persons in my body as causally correlated with the phenomenon.
Something is ‘cognitive‘ if it is the counterpart of a phenomenon which is not empirical in one of the meanings (1) – (3).
It is a common task within philosophy to analyze the space of the phenomena with regard to its structure as well as to its dynamics. Until today there exists not yet a complete accepted theory for this subject. This indicates that this seems to be some ‘hard’ task to do.
BRIDGING THE GAP BETWEEN BRAINS
As one can see in figure 1 a brain in a body is completely disconnected from the brain in another body. There is a real, deep ‘gap’ which has to be overcome if the two brains want to ‘coordinate’ their ‘planned actions’.
Luckily the emergence of homo sapiens with the new extended property of ‘consciousness’ was accompanied by another exciting property, the ability to ‘talk’. This ability enabled the creation of symbolic languages which can help two disconnected brains to have some exchange.
But ‘language’ does not consist of sounds or a ‘sequence of sounds’ only; the special power of a language is the further property that sequences of sounds can be associated with ‘something else’ which serves as the ‘meaning’ of these sounds. Thus we can use sounds to ‘talk about’ other things like objects, events, properties etc.
The single brain ‘knows’ about the relationship between some sounds and ‘something else’ because the brain is able to ‘generate relations’ between brain-structures for sounds and brain-structures for something else. These relations are some real connections in the brain. Therefore sounds can be related to ‘something else’ or certain objects, and events, objects etc. can become related to certain sounds. But these ‘meaning relations’ can only ‘bridge the gap’ to another brain if both brains are using the same ‘mapping’, the same ‘encoding’. This is only possible if the two brains with their bodies share a real world situation RW_S where the perceptions of the both brains are associated with the same parts of the real world between both bodies. If this is the case the perceptions P(RW_S) can become somehow ‘synchronized’ by the shared part of the real world which in turn is transformed in the brain structures P(RW_S) —> B_S which represent in the brain the stimulating aspects of the real world. These brain structures B_S can then be associated with some sound structures B_A written as a relation MEANING(B_S, B_A). Such a relation realizes an encoding which can be used for communication. Communication is using sound sequences exchanged between brains via the body and the air of an environment as ‘expressions’ which can be recognized as part of a learned encoding which enables the receiving brain to identify a possible meaning candidate.
DIFFERENT MODES TO EXPRESS MEANING
Following the evolution of communication one can distinguish four important modes of expressing meaning, which will be used in this AAI paradigm.
VISUAL ENCODING
A direct way to express the internal meaning structures of a brain is to use a ‘visual code’ which represents by some kinds of drawing the visual shapes of objects in the space, some attributes of shapes, which are common for all people who can ‘see’. Thus a picture and then a sequence of pictures like a comic or a story board can communicate simple ideas of situations, participating objects, persons and animals, showing changes in the arrangement of the shapes in the space.
Figure 2: Pictorial expressions representing aspects of the visual and the auditory sens modes
Even with a simple visual code one can generate many sequences of situations which all together can ‘tell a story’. The basic elements are a presupposed ‘space’ with possible ‘objects’ in this space with different positions, sizes, relations and properties. One can even enhance these visual shapes with written expressions of a spoken language. The sequence of the pictures represents additionally some ‘timely order’. ‘Changes’ can be encoded by ‘differences’ between consecutive pictures.
FROM SPOKEN TO WRITTEN LANGUAGE EXPRESSIONS
Later in the evolution of language, much later, the homo sapiens has learned to translate the spoken language L_s in a written format L_w using signs for parts of words or even whole words. The possible meaning of these written expressions were no longer directly ‘visible’. The meaning was now only available for those people who had learned how these written expressions are associated with intended meanings encoded in the head of all language participants. Thus only hearing or reading a language expression would tell the reader either ‘nothing’ or some ‘possible meanings’ or a ‘definite meaning’.
Figure 3: A written textual version in parallel to a pictorial version
If one has only the written expressions then one has to ‘know’ with which ‘meaning in the brain’ the expressions have to be associated. And what is very special with the written expressions compared to the pictorial expressions is the fact that the elements of the pictorial expressions are always very ‘concrete’ visual objects while the written expressions are ‘general’ expressions allowing many different concrete interpretations. Thus the expression ‘person’ can be used to be associated with many thousands different concrete objects; the same holds for the expression ‘road’, ‘moving’, ‘before’ and so on. Thus the written expressions are like ‘manufacturing instructions’ to search for possible meanings and configure these meanings to a ‘reasonable’ complex matter. And because written expressions are in general rather ‘abstract’/ ‘general’ which allow numerous possible concrete realizations they are very ‘economic’ because they use minimal expressions to built many complex meanings. Nevertheless the daily experience with spoken and written expressions shows that they are continuously candidates for false interpretations.
FORMAL MATHEMATICAL WRITTEN EXPRESSIONS
Besides the written expressions of everyday languages one can observe later in the history of written languages the steady development of a specialized version called ‘formal languages’ L_f with many different domains of application. Here I am focusing on the formal written languages which are used in mathematics as well as some pictorial elements to ‘visualize’ the intended ‘meaning’ of these formal mathematical expressions.
Fig. 4: Properties of an acyclic directed graph with nodes (vertices) and edges (directed edges = arrows)
One prominent concept in mathematics is the concept of a ‘graph’. In the basic version there are only some ‘nodes’ (also called vertices) and some ‘edges’ connecting the nodes. Formally one can represent these edges as ‘pairs of nodes’. If N represents the set of nodes then N x N represents the set of all pairs of these nodes.
In a more specialized version the edges are ‘directed’ (like a ‘one way road’) and also can be ‘looped back’ to a node occurring ‘earlier’ in the graph. If such back-looping arrows occur a graph is called a ‘cyclic graph’.
Fig.5: Directed cyclic graph extended to represent ‘states of affairs’
If one wants to use such a graph to describe some ‘states of affairs’ with their possible ‘changes’ one can ‘interpret’ a ‘node’ as a state of affairs and an arrow as a change which turns one state of affairs S in a new one S’ which is minimally different to the old one.
As a state of affairs I understand here a ‘situation’ embedded in some ‘context’ presupposing some common ‘space’. The possible ‘changes’ represented by arrows presuppose some dimension of ‘time’. Thus if a node n’ is following a node n indicated by an arrow then the state of affairs represented by the node n’ is to interpret as following the state of affairs represented in the node n with regard to the presupposed time T ‘later’, or n < n’ with ‘<‘ as a symbol for a timely ordering relation.
Fig.6: Example of a state of affairs with a 2-dimensional space configured as a grid with a black and a white token
The space can be any kind of a space. If one assumes as an example a 2-dimensional space configured as a grid –as shown in figure 6 — with two tokens at certain positions one can introduce a language to describe the ‘facts’ which constitute the state of affairs. In this example one needs ‘names for objects’, ‘properties of objects’ as well as ‘relations between objects’. A possible finite set of facts for situation 1 could be the following:
TOKEN(T1), BLACK(T1), POSITION(T1,1,1)
TOKEN(T2), WHITE(T2), POSITION(T2,2,1)
NEIGHBOR(T1,T2)
CELL(C1), POSITION(1,2), FREE(C1)
‘T1’, ‘T2’, as well as ‘C1’ are names of objects, ‘TOKEN’, ‘BACK’ etc. are names of properties, and ‘NEIGHBOR’ is a relation between objects. This results in the equation:
These facts describe the situation S1. If it is important to describe possible objects ‘external to the situation’ as important factors which can cause some changes then one can describe these objects as a set of facts in a separated ‘context’. In this example this could be two players which can move the black and white tokens and thereby causing a change of the situation. What is the situation and what belongs to a context is somewhat arbitrary. If one describes the agriculture of some region one usually would not count the planets and the atmosphere as part of this region but one knows that e.g. the sun can severely influence the situation in combination with the atmosphere.
Fig.7: Change of a state of affairs given as a state which will be enhanced by a new object
Let us stay with a state of affairs with only a situation without a context. The state of affairs is a ‘state’. In the example shown in figure 6 I assume a ‘change’ caused by the insertion of a new black token at position (2,2). Written in the language of facts L_fact we get:
Thus the new state S2 is generated out of the old state S1 by unifying S1 with the set of new facts: S2 = S1 ∪ {TOKEN(T3), BLACK(T3), POSITION(2,2), NEIGHBOR(T3,T2)}. All the other facts of S1 are still ‘valid’. In a more general manner one can introduce a change-expression with the following format:
This can be read as follows: The follow-up state S2 is generated out of the state S1 by adding to the state S1 the set of facts { … }.
This layout of a change expression can also be used if some facts have to be modified or removed from a state. If for instance by some reason the white token should be removed from the situation one could write:
These simple examples demonstrate another fact: while facts about objects and their properties are independent from each other do relational facts depend from the state of their object facts. The relation of neighborhood e.g. depends from the participating neighbors. If — as in the example above — the object token T2 disappears then the relation ‘NEIGHBOR(T1,T2)’ no longer holds. This points to a hierarchy of dependencies with the ‘basic facts’ at the ‘root’ of a situation and all the other facts ‘above’ basic facts or ‘higher’ depending from the basic facts. Thus ‘higher order’ facts should be added only for the actual state and have to be ‘re-computed’ for every follow-up state anew.
If one would specify a context for state S1 saying that there are two players and one allows for each player actions like ‘move’, ‘insert’ or ‘delete’ then one could make the change from state S1 to state S2 more precise. Assuming the following facts for the context:
PLAYER(PB1), PLAYER(PW1), HAS-THE-TURN(PB1)
In that case one could enhance the change statement in the following way:
This would read as follows: given state S1 the player PB1 inserts a black token at position (2,2); this yields a new state S2.
With or without a specified context but with regard to a set of possible change statements it can be — which is the usual case — that there is more than one option what can be changed. Some of the main types of changes are the following ones:
RANDOM
NOT RANDOM, which can be specified as follows:
With PROBABILITIES (classical, quantum probability, …)
DETERMINISTIC
Furthermore, if the causing object is an actor which can adapt structurally or even learn locally then this actor can appear in some time period like a deterministic system, in different collected time periods as an ‘oscillating system’ with different behavior, or even as a random system with changing probabilities. This make the forecast of systems with adaptive and/ or learning systems rather difficult.
Another aspect results from the fact that there can be states either with one actor which can cause more than one action in parallel or a state with multiple actors which can act simultaneously. In both cases the resulting total change has eventually to be ‘filtered’ through some additional rules telling what is ‘possible’ in a state and what not. Thus if in the example of figure 6 both player want to insert a token at position (2,2) simultaneously then either the rules of the game would forbid such a simultaneous action or — like in a computer game — simultaneous actions are allowed but the ‘geometry of a 2-dimensional space’ would not allow that two different tokens are at the same position.
Another aspect of change is the dimension of time. If the time dimension is not explicitly specified then a change from some state S_i to a state S_j does only mark the follow up state S_j as later. There is no specific ‘metric’ of time. If instead a certain ‘clock’ is specified then all changes have to be aligned with this ‘overall clock’. Then one can specify at what ‘point of time t’ the change will begin and at what point of time t*’ the change will be ended. If there is more than one change specified then these different changes can have different timings.
THIRD PERSON VIEW
Up until now the point of view describing a state and the possible changes of states is done in the so-called 3rd-person view: what can a person perceive if it is part of a situation and is looking into the situation. It is explicitly assumed that such a person can perceive only the ‘surface’ of objects, including all kinds of actors. Thus if a driver of a car stears his car in a certain direction than the ‘observing person’ can see what happens, but can not ‘look into’ the driver ‘why’ he is steering in this way or ‘what he is planning next’.
A 3rd-person view is assumed to be the ‘normal mode of observation’ and it is the normal mode of empirical science.
Nevertheless there are situations where one wants to ‘understand’ a bit more ‘what is going on in a system’. Thus a biologist can be interested to understand what mechanisms ‘inside a plant’ are responsible for the growth of a plant or for some kinds of plant-disfunctions. There are similar cases for to understand the behavior of animals and men. For instance it is an interesting question what kinds of ‘processes’ are in an animal available to ‘navigate’ in the environment across distances. Even if the biologist can look ‘into the body’, even ‘into the brain’, the cells as such do not tell a sufficient story. One has to understand the ‘functions’ which are enabled by the billions of cells, these functions are complex relations associated with certain ‘structures’ and certain ‘signals’. For this it is necessary to construct an explicit formal (mathematical) model/ theory representing all the necessary signals and relations which can be used to ‘explain’ the obsrvable behavior and which ‘explains’ the behavior of the billions of cells enabling such a behavior.
In a simpler, ‘relaxed’ kind of modeling one would not take into account the properties and behavior of the ‘real cells’ but one would limit the scope to build a formal model which suffices to explain the oservable behavior.
This kind of approach to set up models of possible ‘internal’ (as such hidden) processes of an actor can extend the 3rd-person view substantially. These models are called in this text ‘actor models (AM)’.
HIDDEN WORLD PROCESSES
In this text all reported 3rd-person observations are called ‘actor story’, independent whether they are done in a pictorial or a textual mode.
As has been pointed out such actor stories are somewhat ‘limited’ in what they can describe.
It is possible to extend such an actor story (AS) by several actor models (AM).
An actor story defines the situations in which an actor can occur. This includes all kinds of stimuli which can trigger the possible senses of the actor as well as all kinds of actions an actor can apply to a situation.
The actor model of such an actor has to enable the actor to handle all these assumed stimuli as well as all these actions in the expected way.
While the actor story can be checked whether it is describing a process in an empirical ‘sound’ way, the actor models are either ‘purely theoretical’ but ‘behavioral sound’ or they are also empirically sound with regard to the body of a biological or a technological system.
A serious challenge is the occurrence of adaptiv or/ and locally learning systems. While the actor story is a finite description of possible states and changes, adaptiv or/ and locally learning systeme can change their behavior while ‘living’ in the actor story. These changes in the behavior can not completely be ‘foreseen’!
COGNITIVE EXPERT PROCESSES
According to the preceding considerations a homo sapiens as a biological system has besides many properties at least a consciousness and the ability to talk and by this to communicate with symbolic languages.
Looking to basic modes of an actor story (AS) one can infer some basic concepts inherently present in the communication.
Without having an explicit model of the internal processes in a homo sapiens system one can infer some basic properties from the communicative acts:
Speaker and hearer presuppose a space within which objects with properties can occur.
Changes can happen which presuppose some timely ordering.
There is a disctinction between concrete things and abstract concepts which correspond to many concrete things.
There is an implicit hierarchy of concepts starting with concrete objects at the ‘root level’ given as occurence in a concrete situation. Other concepts of ‘higher levels’ refer to concepts of lower levels.
There are different kinds of relations between objects on different conceptual levels.
The usage of language expressions presupposes structures which can be associated with the expressions as their ‘meanings’. The mapping between expressions and their meaning has to be learned by each actor separately, but in cooperation with all the other actors, with which the actor wants to share his meanings.
It is assume that all the processes which enable the generation of concepts, concept hierarchies, relations, meaning relations etc. are unconscious! In the consciousness one can use parts of the unconscious structures and processes under strictly limited conditions.
To ‘learn’ dedicated matters and to be ‘critical’ about the quality of what one is learnig requires some disciplin, some learning methods, and a ‘learning-friendly’ environment. There is no guaranteed method of success.
There are lots of unconscious processes which can influence understanding, learning, planning, decisions etc. and which until today are not yet sufficiently cleared up.
This text has to be reviewed again on account of the new aspect of gaming as discussed in the post Engineering and Society.
CONTEXT
An overview of the enhanced AAI theory version 2 you can find here. In this post we talk about the sixth chapter dealing with usability and usefulness.
USABILITY AND USEFULNESS
In the AAI paradigm the concept of usability is seen as a sub-topic of the more broader concept of usefulness. Furthermore Usefulness as well as usability are understood as measurements comparing some target with some presupposed norm.
Example: If someone wants to buy a product A whose prize fits well with the available budget and this product A shows only an average usability then the product is probably ‘more useful’ for the buyer than another product B which does not fit with the budget although it has a better usability. A conflict can arise if the weaker value of the usability of product A causes during the usage of product A ‘bad effects’ onto the user of product A which in turn produce additional negative costs which enhance the original ‘nice price’ to a degree where the product A becomes finally ‘more costly’ than product B.
Therefore the concept usefulness will be defined independently from the concept usability and depends completely from the person or company who is searching for the solution of a problem. The concept of usability depends directly on the real structure of an actor, a biological one or a non-biological one. Thus independent of the definition of the actual usefulness the given structure of an actor implies certain capabilities with regard to input, output as well as to internal processing. Therefore if an X seems to be highly useful for someone and to get X needs a certain actor story to become realized with certain actors then it can matter whether this process includes a ‘good usability’ for the participating actors or not.
In the AAI paradigm both concepts usefulness as well as usability will be analyzed to provide a chance to check the contributions of both concepts in some predefined duration of usage. This allows the analysis of the sustainability of the wanted usefulness restricted to usability as a parameter. There can be even more parameters included in the evaluation of the actor story to enhance the scope of sustainability. Depending from the definition of the concept of resilience one can interpret the concept of sustainability used in this AAI paradigm as compatible with the resilience concept too.
MEASUREMENT
To speak about ‘usefulness’, ‘usability’, ‘sustainability’ (or ‘resilience’) requires some kind of a scale of values with an ordering relation R allowing to state about some values x,y whether R(x,y) or R(y,x) or EQUAL(x,y). The values used in the scale have to be generated by some defined process P which is understood as a measurement process M which basically compares some target X with some predefined norm N and gives as a result a pair (v,N) telling a number v associated with the applied norm N. Written: M : X x N —> V x N.
A measurement procedure M must be transparent and repeatable in the sense that the repeated application of the measurement procedure M will generate the same results than before. Associated with the measurement procedure there can exist many additional parameters like ‘location’, ‘time’, ‘temperature’, ‘humidity’, ‘used technologies’, etc.
Because there exist targets X which are not static it can be a problem when and how often one has to measure these targets to get some reliable value. And this problem becomes even worse if the target includes adaptive systems which are changing constantly like in the case of biological systems.
All biological systems have some degree of learnability. Thus if a human actor is acting as part of an actor story the human actor will learn every time he is working through the process. Thus making errors during his first run of the process does not imply that he will repeat these errors the next time. Usually one can observe a learning curve associated with n-many runs which show — mostly — a decrease in errors, a decrease in processing time, and — in general — a change of all parameters, which can be measured. Thus a certain actor story can receive a good usability value after a defined number of usages. But there are other possible subjective parameters like satisfaction, being excited, being interested and the like which can change in the opposite direction, because to become well adapted to the process can be boring which in turn can lead to less concentrations with many different negative consequences.
Update 4.July 2018 (Chapter 4 Actor Model; improving the terminology of environments with actors, actors as input-output systems, basic and real interface, a first typology of input-output systems…)
Update 20.July 2018 (Disentanglement of chapter ‘Simulation & Verification’ into two independent chapters; corrections in the chapter ‘Introduction’; corrections in chapter ‘AAI Analysis’; extracting ‘Simulation’ from chapter ‘Actor Story’ to new chapter ‘Simulation’; New chapter ‘Simulation’; Rewriting of chapter ‘Looking Forward’)
Update 22.July 2018 (Rewriting the beginning of the chapter ‘Actor Story (AS)’, not completed; converting chapter ‘AS+AM Summary’ to ‘AS and AM Philosophy’, not completed)
Update 23.July 2018 (Attaching a new chapter with a Case Study illustrating an actor story (AS). This case study is still unfinished. It is a case study of a real project!)
Update 8.August 2018 (Modifying chapter AS as Text, Comic, Graph; especially section about the textual mode and the pictorial mode; first sketch for a mapping from the textual mode into the pictorial mode)
Update 9.August 2018 (Modification of the section ‘Mathematical Actor Story (MAS) in chapter 4).
Update 11.August 2018 (Improving chapter 3 ‘Actor Story; nearly complete rewriting of chapter 4 ‘AS as text, comic, graph’.)
Update 13.August 2018 (I am still catched by the chapters 3+4. In chapter the cognitive structure of the actors has been further enhanced; in chapter 4 a complete example of a mathematical actor story could now been attached.)
Update 14.August 2018 (minor corrections to chapter 4 + 5; change-statements define for each state individual combinatorial spaces (a little bit like a quantum state); whether and how these spaces will be concretized/ realized depends completely from the participating actors)
Update 15.August 2018 (Canceled the appendix with the case study stub and replaced it with an overview for a supporting software tool which is needed for the real usage of this theory. At the moment it is open who will write the software.)
Update 2.October 2018 (Configuring the whole book now with 3 parts: I. Theory, II. Application, III. Software. Gerd has his focus on part I, Zeynep will focus on part II and ‘somebody’ will focus on part III (in the worst case we will — nevertheless — have a minimal version :-)). For a first quick overview about everything read the ‘Preface’ and the ‘Introduction’.
Update 4.November 2018 (Rewriting the Introduction (and some minor corrections in the Preface). The idea of the rewriting was to address all the topics which will be discussed in the book and pointing out to the logical connections between them. This induces some wrong links in the following chapters, which are not yet updated. Some chapters are yet completely missing. But to improve the clearness of the focus and the logical inter-dependencies helps to elaborate the missing texts a lot. Another change is the wording of the title. Until now it is difficult to find a title which is exactly matching the content. The new proposal shows the focus ‘AAI’ but lists the keywords of the main topics within AAA analysis because these topics are usually not necessarily associated with AAI.)
ACTOR-ACTOR INTERACTION [AAI]. An Actor Centered Approach to Problem Solving. Combining Engineering and Philosophy
by
GERD DOEBEN-HENISCH in cooperation with LOUWRENCE ERASMUS, ZEYNEP TUNCER
PRE-VIEW: NEW EXPANDED AAI THEORY 23.January 2019: Outline of the new expanded AAI Paradigm. Before re-writing the main text with these ideas the new advanced AAI theory will first be tested during the summer 2019 within a lecture with student teams as well as in several workshops outside the Frankfurt University of Applied Sciences with members of different institutions.
Integrating Engineering and the Human Factor (info@uffmm.org) eJournal uffmm.org ISSN 2567-6458