It addresses the paradox that, although we constantly feel like we are navigating in a real world, the ‘contents of our brain’ are not the ‘real world’ itself. Instead, these contents are the product of numerous neural transformation processes that convert ‘stimuli from the real world’ into ‘internal states,’ which we then treat as if they were the real world. This ‘as if’ is not a matter of free choice, as this situation results from the way our brain functions within our body. Through our body and brain, we are initially ‘locked-in’ systems.
This can also be illustrated by the fact that our body — as we all assume — finds itself in an everyday world consisting of many other bodies and objects with which our body ‘interacts’: we can move in the everyday world around and thereby change our ‘position’ in this world. We can touch, grasp, move, and alter objects. But these everyday objects can also act upon us: we perceive ‘smell,’ we ‘hear’ sounds, we ‘see’ shapes, colors, brightness, and much more.
This ‘perception’ of our everyday world through various ‘sense organs’ is by no means simple upon closer inspection: when visual stimuli hit our ‘eyes’ or acoustic stimuli hit our ‘ears,’ these physical stimuli from the everyday world are converted/transformed in the ‘sense organ’ into chemical state changes of nerve cells. These, in turn, are transformed into electrical potentials that can then propagate as ‘signals’ through further nerve cells. A ‘signal flow’ is created. The impressive thing about these signal flows is that they all have the same chemical-physical properties, regardless of whether they were triggered by visual or acoustic stimuli (or by other sense organs).
Whatever we perceive through our sense organs in conjunction with nerve cells, what then happens in our brain is not directly ‘the world out there’ as it is physically and chemically constituted, but the world as it has been transformed by our sense organs and the connected nerve cells into ‘neuronal signal flows’ that are further processed in the tissue of billions of nerve cells.
From the perspective of us humans, who have this body with its brain, these signal flows generate a ‘reality’ within us that we take as ‘face value,’ even though, compared to the external reality, it is only ‘virtual’, a ‘virtuality’. In this sense, one can say that the ‘reality of the external world’ appears in us as ‘virtuality,’ which is stimulated/induced in the domain of signal flows by the sense organs from the ‘reality of the external world.’
In this review I discuss the ideas of the book The Psychology of Science (1966) from A.Maslow. His book is in a certain sense outstanding because the point of view is in one respect inspired by an artificial borderline between the mainstream-view of empirical science and the mainstream-view of psychotherapy. In another respect the book discusses a possible integrated view of empirical science with psychotherapy as an integral part. The point of view of the reviewer is the new paradigm of a Generative Cultural Anthropology[GCA]. Part II of this review reports some considerations reflecting the relationship of the point of view of Maslow and the point of view of GCA.
In this section several case studies will be presented. It will be shown, how the DAAI paradigm can be applied to many different contexts . Since the original version of the DAAI-Theory in Jan 18, 2020 the concept has been further developed centering around the concept of a Collective Man-Machine Intelligence [CM:MI] to address now any kinds of experts for any kind of simulation-based development, testing and gaming. Additionally the concept now can be associated with any kind of embedded algorithmic intelligence [EAI] (different to the mainstream concept ‘artificial intelligence’). The new concept can be used with every normal language; no need for any special programming language! Go back to the overall framework.
COLLECTION OF PAPERS
There exists only a loosely order between the different papers due to the character of this elaboration process: generally this is an experimental philosophical process. HMI Analysis applied for the CM:MI paradigm.
FROM DAAI to GCA. Turning Engineering into Generative Cultural Anthropology. This paper gives an outline how one can map the DAAI paradigm directly into the GCA paradigm (April-19,2020): case1-daai-gca-v1
A first GCA open research project [GCA-OR No.1]. This paper outlines a first open research project using the GCA. This will be the framework for the first implementations (May-5, 2020): GCAOR-v0-1
Engineering and Society. A Case Study for the DAAI Paradigm – Introduction. This paper illustrates important aspects of a cultural process looking to the acting actors where certain groups of people (experts of different kinds) can realize the generation, the exploration, and the testing of dynamical models as part of a surrounding society. Engineering is clearly not separated from society (April-9, 2020): case1-population-start-part0-v1
Bootstrapping some Citizens. This paper clarifies the set of general assumptions which can and which should be presupposed for every kind of a real world dynamical model (April-4, 2020): case1-population-start-v1-1
Hybrid Simulation Game Environment [HSGE]. This paper outlines the simulation environment by combing a usual web-conference tool with an interactive web-page by our own (23.May 2020): HSGE-v2 (May-5, 2020): HSGE-v0-1
The Observer-World Framework. This paper describes the foundations of any kind of observer-based modeling or theory construction.(July 16, 2020)
Last change: 23.February 2019 (continued the text)
Last change: 24.February 2019 (extended the text)
CONTEXT
In the overview of the AAI paradigm version 2 you can find this section dealing with the philosophical perspective of the AAI paradigm. Enjoy reading (or not, then send a comment :-)).
THE DAILY LIFE PERSPECTIVE
The perspective of Philosophy is rooted in the everyday life perspective. With our body we occur in a space with other bodies and objects; different features, properties are associated with the objects, different kinds of relations an changes from one state to another.
From the empirical sciences we have learned to see more details of the everyday life with regard to detailed structures of matter and biological life, with regard to the long history of the actual world, with regard to many interesting dynamics within the objects, within biological systems, as part of earth, the solar system and much more.
A certain aspect of the empirical view of the world is the fact, that some biological systems called ‘homo sapiens’, which emerged only some 300.000 years ago in Africa, show a special property usually called ‘consciousness’ combined with the ability to ‘communicate by symbolic languages’.
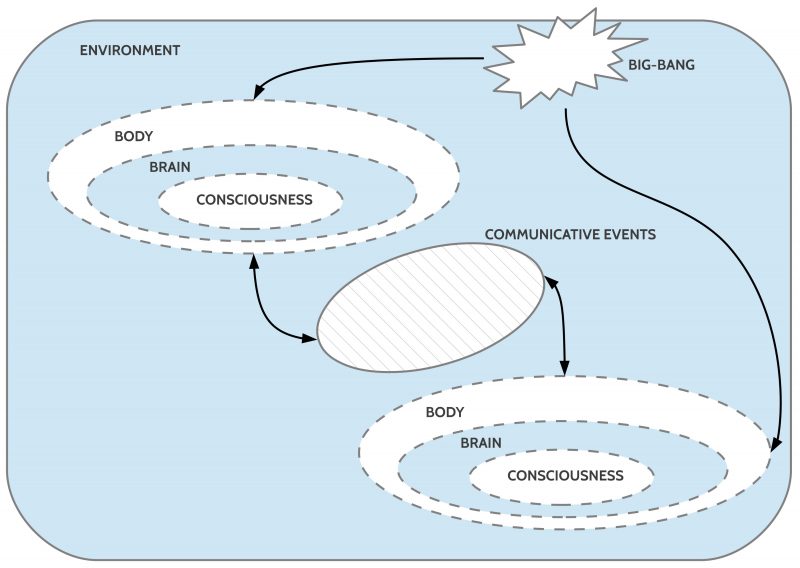
Figure 1: General setting of the homo sapiens species (simplified)
As we know today the consciousness is associated with the brain, which in turn is embedded in the body, which is further embedded in an environment.
Thus those ‘things’ about which we are ‘conscious’ are not ‘directly’ the objects and events of the surrounding real world but the ‘constructions of the brain’ based on actual external and internal sensor inputs as well as already collected ‘knowledge’. To qualify the ‘conscious things’ as ‘different’ from the assumed ‘real things’ ‘outside there’ it is common to speak of these brain-generated virtual things either as ‘qualia’ or — more often — as ‘phenomena’ which are different to the assumed possible real things somewhere ‘out there’.
PHILOSOPHY AS FIRST PERSON VIEW
‘Philosophy’ has many facets. One enters the scene if we are taking the insight into the general virtual character of our primary knowledge to be the primary and irreducible perspective of knowledge. Every other more special kind of knowledge is necessarily a subspace of this primary phenomenological knowledge.
There is already from the beginning a fundamental distinction possible in the realm of conscious phenomena (PH): there are phenomena which can be ‘generated’ by the consciousness ‘itself’ — mostly called ‘by will’ — and those which are occurring and disappearing without a direct influence of the consciousness, which are in a certain basic sense ‘given’ and ‘independent’, which are appearing and disappearing according to ‘their own’. It is common to call these independent phenomena ’empirical phenomena’ which represent a true subset of all phenomena: PH_emp ⊂ PH. Attention: These empirical phenomena’ are still ‘phenomena’, virtual entities generated by the brain inside the brain, not directly controllable ‘by will’.
There is a further basic distinction which differentiates the empirical phenomena into those PH_emp_bdy which are controlled by some processes in the body (being tired, being hungry, having pain, …) and those PH_emp_ext which are controlled by objects and events in the environment beyond the body (light, sounds, temperature, surfaces of objects, …). Both subsets of empirical phenomena are different: PH_emp_bdy ∩ PH_emp_ext = 0. Because phenomena usually are occurring associated with typical other phenomena there are ‘clusters’/ ‘pattern’ of phenomena which ‘represent’ possible events or states.
Modern empirical science has ‘refined’ the concept of an empirical phenomenon by introducing ‘standard objects’ which can be used to ‘compare’ some empirical phenomenon with such an empirical standard object. Thus even when the perception of two different observers possibly differs somehow with regard to a certain empirical phenomenon, the additional comparison with an ’empirical standard object’ which is the ‘same’ for both observers, enhances the quality, improves the precision of the perception of the empirical phenomena.
From these considerations we can derive the following informal definitions:
Something is ‘empirical‘ if it is the ‘real counterpart’ of a phenomenon which can be observed by other persons in my environment too.
Something is ‘standardized empirical‘ if it is empirical and can additionally be associated with a before introduced empirical standard object.
Something is ‘weak empirical‘ if it is the ‘real counterpart’ of a phenomenon which can potentially be observed by other persons in my body as causally correlated with the phenomenon.
Something is ‘cognitive‘ if it is the counterpart of a phenomenon which is not empirical in one of the meanings (1) – (3).
It is a common task within philosophy to analyze the space of the phenomena with regard to its structure as well as to its dynamics. Until today there exists not yet a complete accepted theory for this subject. This indicates that this seems to be some ‘hard’ task to do.
BRIDGING THE GAP BETWEEN BRAINS
As one can see in figure 1 a brain in a body is completely disconnected from the brain in another body. There is a real, deep ‘gap’ which has to be overcome if the two brains want to ‘coordinate’ their ‘planned actions’.
Luckily the emergence of homo sapiens with the new extended property of ‘consciousness’ was accompanied by another exciting property, the ability to ‘talk’. This ability enabled the creation of symbolic languages which can help two disconnected brains to have some exchange.
But ‘language’ does not consist of sounds or a ‘sequence of sounds’ only; the special power of a language is the further property that sequences of sounds can be associated with ‘something else’ which serves as the ‘meaning’ of these sounds. Thus we can use sounds to ‘talk about’ other things like objects, events, properties etc.
The single brain ‘knows’ about the relationship between some sounds and ‘something else’ because the brain is able to ‘generate relations’ between brain-structures for sounds and brain-structures for something else. These relations are some real connections in the brain. Therefore sounds can be related to ‘something else’ or certain objects, and events, objects etc. can become related to certain sounds. But these ‘meaning relations’ can only ‘bridge the gap’ to another brain if both brains are using the same ‘mapping’, the same ‘encoding’. This is only possible if the two brains with their bodies share a real world situation RW_S where the perceptions of the both brains are associated with the same parts of the real world between both bodies. If this is the case the perceptions P(RW_S) can become somehow ‘synchronized’ by the shared part of the real world which in turn is transformed in the brain structures P(RW_S) —> B_S which represent in the brain the stimulating aspects of the real world. These brain structures B_S can then be associated with some sound structures B_A written as a relation MEANING(B_S, B_A). Such a relation realizes an encoding which can be used for communication. Communication is using sound sequences exchanged between brains via the body and the air of an environment as ‘expressions’ which can be recognized as part of a learned encoding which enables the receiving brain to identify a possible meaning candidate.
DIFFERENT MODES TO EXPRESS MEANING
Following the evolution of communication one can distinguish four important modes of expressing meaning, which will be used in this AAI paradigm.
VISUAL ENCODING
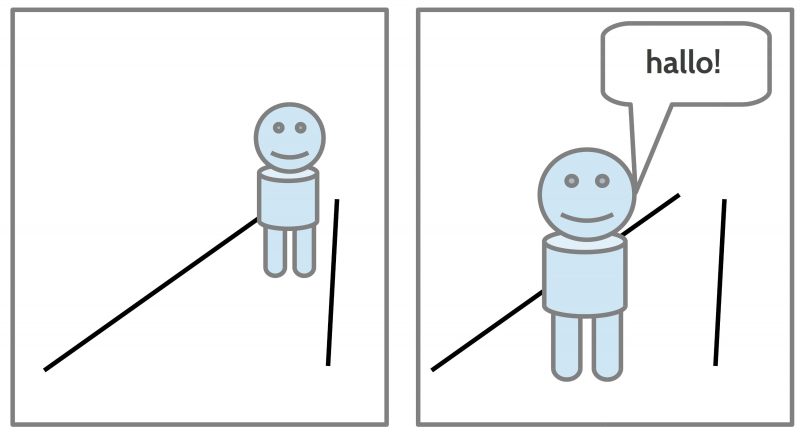
A direct way to express the internal meaning structures of a brain is to use a ‘visual code’ which represents by some kinds of drawing the visual shapes of objects in the space, some attributes of shapes, which are common for all people who can ‘see’. Thus a picture and then a sequence of pictures like a comic or a story board can communicate simple ideas of situations, participating objects, persons and animals, showing changes in the arrangement of the shapes in the space.
Figure 2: Pictorial expressions representing aspects of the visual and the auditory sens modes
Even with a simple visual code one can generate many sequences of situations which all together can ‘tell a story’. The basic elements are a presupposed ‘space’ with possible ‘objects’ in this space with different positions, sizes, relations and properties. One can even enhance these visual shapes with written expressions of a spoken language. The sequence of the pictures represents additionally some ‘timely order’. ‘Changes’ can be encoded by ‘differences’ between consecutive pictures.
FROM SPOKEN TO WRITTEN LANGUAGE EXPRESSIONS
Later in the evolution of language, much later, the homo sapiens has learned to translate the spoken language L_s in a written format L_w using signs for parts of words or even whole words. The possible meaning of these written expressions were no longer directly ‘visible’. The meaning was now only available for those people who had learned how these written expressions are associated with intended meanings encoded in the head of all language participants. Thus only hearing or reading a language expression would tell the reader either ‘nothing’ or some ‘possible meanings’ or a ‘definite meaning’.
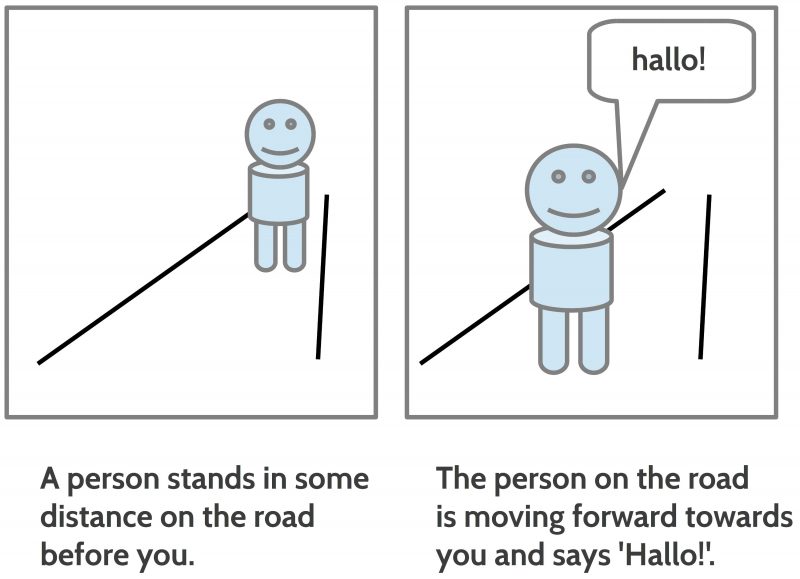
Figure 3: A written textual version in parallel to a pictorial version
If one has only the written expressions then one has to ‘know’ with which ‘meaning in the brain’ the expressions have to be associated. And what is very special with the written expressions compared to the pictorial expressions is the fact that the elements of the pictorial expressions are always very ‘concrete’ visual objects while the written expressions are ‘general’ expressions allowing many different concrete interpretations. Thus the expression ‘person’ can be used to be associated with many thousands different concrete objects; the same holds for the expression ‘road’, ‘moving’, ‘before’ and so on. Thus the written expressions are like ‘manufacturing instructions’ to search for possible meanings and configure these meanings to a ‘reasonable’ complex matter. And because written expressions are in general rather ‘abstract’/ ‘general’ which allow numerous possible concrete realizations they are very ‘economic’ because they use minimal expressions to built many complex meanings. Nevertheless the daily experience with spoken and written expressions shows that they are continuously candidates for false interpretations.
FORMAL MATHEMATICAL WRITTEN EXPRESSIONS
Besides the written expressions of everyday languages one can observe later in the history of written languages the steady development of a specialized version called ‘formal languages’ L_f with many different domains of application. Here I am focusing on the formal written languages which are used in mathematics as well as some pictorial elements to ‘visualize’ the intended ‘meaning’ of these formal mathematical expressions.
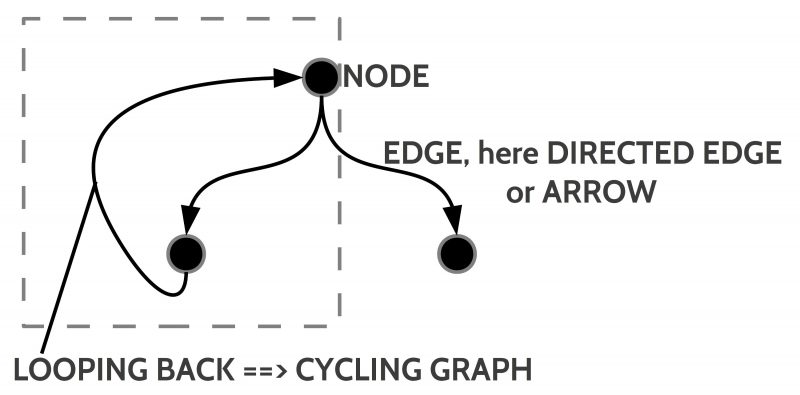
Fig. 4: Properties of an acyclic directed graph with nodes (vertices) and edges (directed edges = arrows)
One prominent concept in mathematics is the concept of a ‘graph’. In the basic version there are only some ‘nodes’ (also called vertices) and some ‘edges’ connecting the nodes. Formally one can represent these edges as ‘pairs of nodes’. If N represents the set of nodes then N x N represents the set of all pairs of these nodes.
In a more specialized version the edges are ‘directed’ (like a ‘one way road’) and also can be ‘looped back’ to a node occurring ‘earlier’ in the graph. If such back-looping arrows occur a graph is called a ‘cyclic graph’.
Fig.5: Directed cyclic graph extended to represent ‘states of affairs’
If one wants to use such a graph to describe some ‘states of affairs’ with their possible ‘changes’ one can ‘interpret’ a ‘node’ as a state of affairs and an arrow as a change which turns one state of affairs S in a new one S’ which is minimally different to the old one.
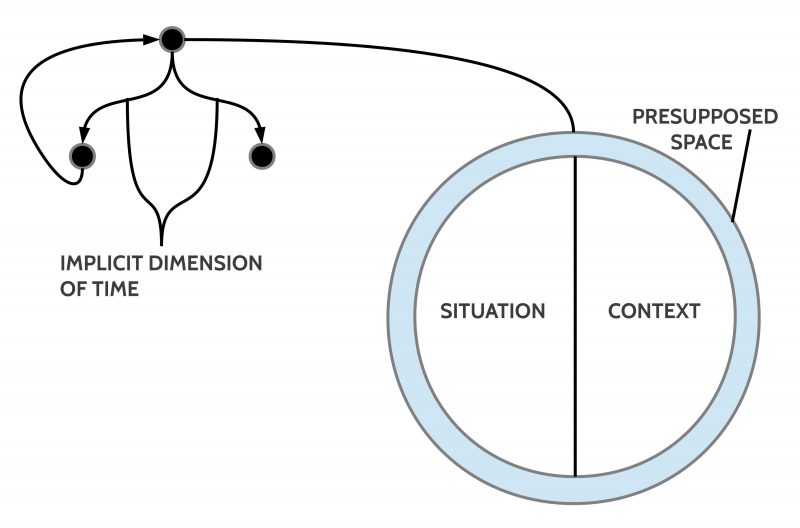
As a state of affairs I understand here a ‘situation’ embedded in some ‘context’ presupposing some common ‘space’. The possible ‘changes’ represented by arrows presuppose some dimension of ‘time’. Thus if a node n’ is following a node n indicated by an arrow then the state of affairs represented by the node n’ is to interpret as following the state of affairs represented in the node n with regard to the presupposed time T ‘later’, or n < n’ with ‘<‘ as a symbol for a timely ordering relation.
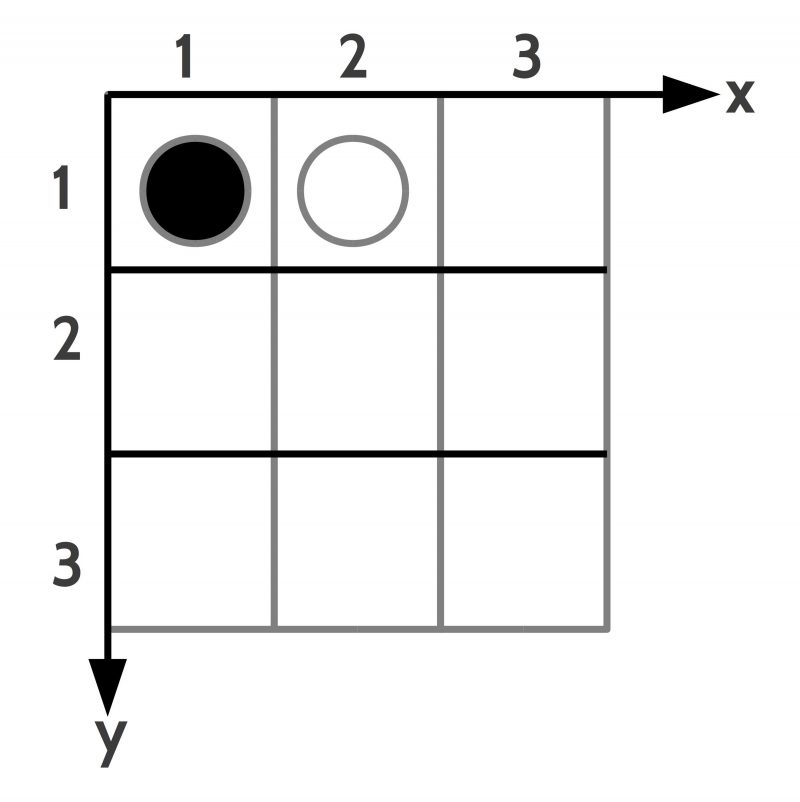
Fig.6: Example of a state of affairs with a 2-dimensional space configured as a grid with a black and a white token
The space can be any kind of a space. If one assumes as an example a 2-dimensional space configured as a grid –as shown in figure 6 — with two tokens at certain positions one can introduce a language to describe the ‘facts’ which constitute the state of affairs. In this example one needs ‘names for objects’, ‘properties of objects’ as well as ‘relations between objects’. A possible finite set of facts for situation 1 could be the following:
TOKEN(T1), BLACK(T1), POSITION(T1,1,1)
TOKEN(T2), WHITE(T2), POSITION(T2,2,1)
NEIGHBOR(T1,T2)
CELL(C1), POSITION(1,2), FREE(C1)
‘T1’, ‘T2’, as well as ‘C1’ are names of objects, ‘TOKEN’, ‘BACK’ etc. are names of properties, and ‘NEIGHBOR’ is a relation between objects. This results in the equation:
These facts describe the situation S1. If it is important to describe possible objects ‘external to the situation’ as important factors which can cause some changes then one can describe these objects as a set of facts in a separated ‘context’. In this example this could be two players which can move the black and white tokens and thereby causing a change of the situation. What is the situation and what belongs to a context is somewhat arbitrary. If one describes the agriculture of some region one usually would not count the planets and the atmosphere as part of this region but one knows that e.g. the sun can severely influence the situation in combination with the atmosphere.
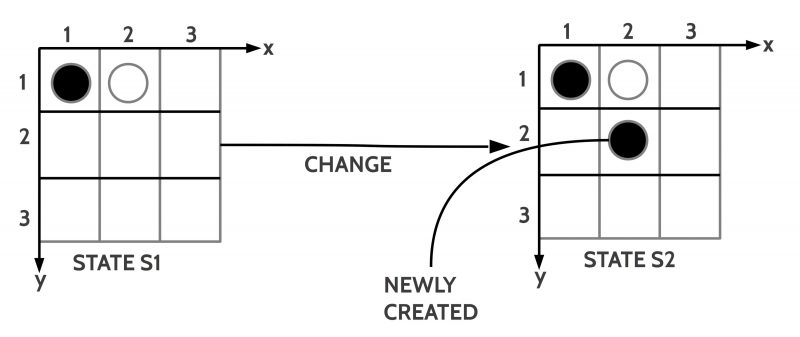
Fig.7: Change of a state of affairs given as a state which will be enhanced by a new object
Let us stay with a state of affairs with only a situation without a context. The state of affairs is a ‘state’. In the example shown in figure 6 I assume a ‘change’ caused by the insertion of a new black token at position (2,2). Written in the language of facts L_fact we get:
Thus the new state S2 is generated out of the old state S1 by unifying S1 with the set of new facts: S2 = S1 ∪ {TOKEN(T3), BLACK(T3), POSITION(2,2), NEIGHBOR(T3,T2)}. All the other facts of S1 are still ‘valid’. In a more general manner one can introduce a change-expression with the following format:
This can be read as follows: The follow-up state S2 is generated out of the state S1 by adding to the state S1 the set of facts { … }.
This layout of a change expression can also be used if some facts have to be modified or removed from a state. If for instance by some reason the white token should be removed from the situation one could write:
These simple examples demonstrate another fact: while facts about objects and their properties are independent from each other do relational facts depend from the state of their object facts. The relation of neighborhood e.g. depends from the participating neighbors. If — as in the example above — the object token T2 disappears then the relation ‘NEIGHBOR(T1,T2)’ no longer holds. This points to a hierarchy of dependencies with the ‘basic facts’ at the ‘root’ of a situation and all the other facts ‘above’ basic facts or ‘higher’ depending from the basic facts. Thus ‘higher order’ facts should be added only for the actual state and have to be ‘re-computed’ for every follow-up state anew.
If one would specify a context for state S1 saying that there are two players and one allows for each player actions like ‘move’, ‘insert’ or ‘delete’ then one could make the change from state S1 to state S2 more precise. Assuming the following facts for the context:
PLAYER(PB1), PLAYER(PW1), HAS-THE-TURN(PB1)
In that case one could enhance the change statement in the following way:
This would read as follows: given state S1 the player PB1 inserts a black token at position (2,2); this yields a new state S2.
With or without a specified context but with regard to a set of possible change statements it can be — which is the usual case — that there is more than one option what can be changed. Some of the main types of changes are the following ones:
RANDOM
NOT RANDOM, which can be specified as follows:
With PROBABILITIES (classical, quantum probability, …)
DETERMINISTIC
Furthermore, if the causing object is an actor which can adapt structurally or even learn locally then this actor can appear in some time period like a deterministic system, in different collected time periods as an ‘oscillating system’ with different behavior, or even as a random system with changing probabilities. This make the forecast of systems with adaptive and/ or learning systems rather difficult.
Another aspect results from the fact that there can be states either with one actor which can cause more than one action in parallel or a state with multiple actors which can act simultaneously. In both cases the resulting total change has eventually to be ‘filtered’ through some additional rules telling what is ‘possible’ in a state and what not. Thus if in the example of figure 6 both player want to insert a token at position (2,2) simultaneously then either the rules of the game would forbid such a simultaneous action or — like in a computer game — simultaneous actions are allowed but the ‘geometry of a 2-dimensional space’ would not allow that two different tokens are at the same position.
Another aspect of change is the dimension of time. If the time dimension is not explicitly specified then a change from some state S_i to a state S_j does only mark the follow up state S_j as later. There is no specific ‘metric’ of time. If instead a certain ‘clock’ is specified then all changes have to be aligned with this ‘overall clock’. Then one can specify at what ‘point of time t’ the change will begin and at what point of time t*’ the change will be ended. If there is more than one change specified then these different changes can have different timings.
THIRD PERSON VIEW
Up until now the point of view describing a state and the possible changes of states is done in the so-called 3rd-person view: what can a person perceive if it is part of a situation and is looking into the situation. It is explicitly assumed that such a person can perceive only the ‘surface’ of objects, including all kinds of actors. Thus if a driver of a car stears his car in a certain direction than the ‘observing person’ can see what happens, but can not ‘look into’ the driver ‘why’ he is steering in this way or ‘what he is planning next’.
A 3rd-person view is assumed to be the ‘normal mode of observation’ and it is the normal mode of empirical science.
Nevertheless there are situations where one wants to ‘understand’ a bit more ‘what is going on in a system’. Thus a biologist can be interested to understand what mechanisms ‘inside a plant’ are responsible for the growth of a plant or for some kinds of plant-disfunctions. There are similar cases for to understand the behavior of animals and men. For instance it is an interesting question what kinds of ‘processes’ are in an animal available to ‘navigate’ in the environment across distances. Even if the biologist can look ‘into the body’, even ‘into the brain’, the cells as such do not tell a sufficient story. One has to understand the ‘functions’ which are enabled by the billions of cells, these functions are complex relations associated with certain ‘structures’ and certain ‘signals’. For this it is necessary to construct an explicit formal (mathematical) model/ theory representing all the necessary signals and relations which can be used to ‘explain’ the obsrvable behavior and which ‘explains’ the behavior of the billions of cells enabling such a behavior.
In a simpler, ‘relaxed’ kind of modeling one would not take into account the properties and behavior of the ‘real cells’ but one would limit the scope to build a formal model which suffices to explain the oservable behavior.
This kind of approach to set up models of possible ‘internal’ (as such hidden) processes of an actor can extend the 3rd-person view substantially. These models are called in this text ‘actor models (AM)’.
HIDDEN WORLD PROCESSES
In this text all reported 3rd-person observations are called ‘actor story’, independent whether they are done in a pictorial or a textual mode.
As has been pointed out such actor stories are somewhat ‘limited’ in what they can describe.
It is possible to extend such an actor story (AS) by several actor models (AM).
An actor story defines the situations in which an actor can occur. This includes all kinds of stimuli which can trigger the possible senses of the actor as well as all kinds of actions an actor can apply to a situation.
The actor model of such an actor has to enable the actor to handle all these assumed stimuli as well as all these actions in the expected way.
While the actor story can be checked whether it is describing a process in an empirical ‘sound’ way, the actor models are either ‘purely theoretical’ but ‘behavioral sound’ or they are also empirically sound with regard to the body of a biological or a technological system.
A serious challenge is the occurrence of adaptiv or/ and locally learning systems. While the actor story is a finite description of possible states and changes, adaptiv or/ and locally learning systeme can change their behavior while ‘living’ in the actor story. These changes in the behavior can not completely be ‘foreseen’!
COGNITIVE EXPERT PROCESSES
According to the preceding considerations a homo sapiens as a biological system has besides many properties at least a consciousness and the ability to talk and by this to communicate with symbolic languages.
Looking to basic modes of an actor story (AS) one can infer some basic concepts inherently present in the communication.
Without having an explicit model of the internal processes in a homo sapiens system one can infer some basic properties from the communicative acts:
Speaker and hearer presuppose a space within which objects with properties can occur.
Changes can happen which presuppose some timely ordering.
There is a disctinction between concrete things and abstract concepts which correspond to many concrete things.
There is an implicit hierarchy of concepts starting with concrete objects at the ‘root level’ given as occurence in a concrete situation. Other concepts of ‘higher levels’ refer to concepts of lower levels.
There are different kinds of relations between objects on different conceptual levels.
The usage of language expressions presupposes structures which can be associated with the expressions as their ‘meanings’. The mapping between expressions and their meaning has to be learned by each actor separately, but in cooperation with all the other actors, with which the actor wants to share his meanings.
It is assume that all the processes which enable the generation of concepts, concept hierarchies, relations, meaning relations etc. are unconscious! In the consciousness one can use parts of the unconscious structures and processes under strictly limited conditions.
To ‘learn’ dedicated matters and to be ‘critical’ about the quality of what one is learnig requires some disciplin, some learning methods, and a ‘learning-friendly’ environment. There is no guaranteed method of success.
There are lots of unconscious processes which can influence understanding, learning, planning, decisions etc. and which until today are not yet sufficiently cleared up.
Last corrections: 14.February 2019 (add some more keywords; added emphasizes for central words)
Change: 5.May 2019 (adding the the aspect of simulation and gaming; extending the view of the driving actors)
CONTEXT
An overview to the enhanced AAI theory version 2 you can find here. In this post we talk about the blueprint of the whole AAI analysis process. Here I leave out the topic of actor models (AM); the aspect of simulation and gaming is mentioned only shortly. For these topics see other posts.
THE AAI ANALYSIS BLUEPRINT
Blueprint of the whole AAI analysis process including the epistemological assumptions. Not shown here is the whole topic of actor models (AM) and as well simulation.
The Actor-Actor Interaction (AAI)analysis is understood here as part of an embracing systems engineering process (SEP), which starts with the statement of a problem (P) which includes a vision (V) of an improved alternative situation. It has then to be analyzed how such a new improved situation S+ looks like; how one can realize certain tasks (T) in an improved way.
DRIVING ACTORS
The driving actors for such an AAI analysis are at least one stakeholder (STH) which communicates a problem P and an envisioned solution (ES) to an expert (EXPaai) with a sufficient AAI experience. This expert will take the lead in the process of transforming the problem and the envisioned solution into a working solution (WS).
In the classical industrial case the stakeholder can be a group of managers from some company and the expert is also represented by a whole team of experts from different disciplines, including the AAI perspective as leading perspective.
In another case which I will call here the communal case — e.g. a whole city — the stakeholder as well as the experts are members of the communal entity. As in the before mentioned cases there is some commonly accepted problem P combined with a first envisioned solution ES, which shall be analyzed: what is needed to make it working? Can it work at all? What are costs? And many other questions can arise. The challenge to include all relevant experience and knowledge from all participants is at the center of the communication and to transform this available knowledge into some working solution which satisfies all stated requirements for all participants is a central condition for the success of the project.
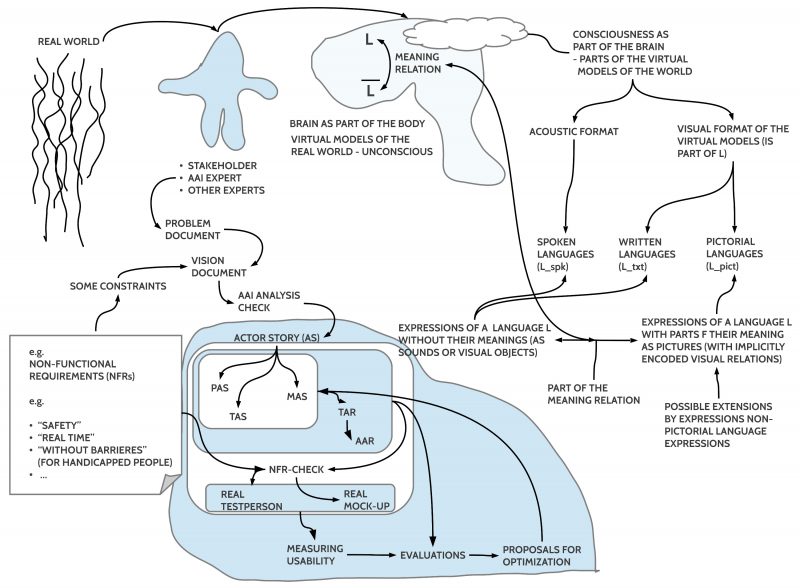
EPISTEMOLOGY
It has to be taken into account that the driving actors are able to do this job because they have in their bodies brains (BRs) which in turn include some consciousness (CNS). The processes and states beyond the consciousness are here called ‘unconscious‘ and the set of all these unconscious processes is called ‘the Unconsciousness’ (UCNS).
For more details to the cognitive processes see the post to the philosophical framework as well as the post bottom-up process. Both posts shall be integrated into one coherent view in the future.
SEMIOTIC SUBSYSTEM
An important set of substructures of the unconsciousness are those which enable symbolic language systems with so-called expressions (L) on one side and so-called non-expressions (~L) on the other. Embedded in a meaning relation (MNR) does the set of non-expressions ~L function as the meaning (MEAN) of the expressions L, written as a mapping MNR: L <—> ~L. Depending from the involved sensors the expressions L can occur either as acoustic events L_spk, or as visual patternswritten L_txt or visual patterns as pictures L_pict or even in other formats, which will not discussed here. The non-expressions can occur in every format which the brain can handle.
While written (symbolic) expressions L are only associated with the intended meaning through encoded mappings in the brain, the spoken expressions L_spk as well as the pictorial ones L_pict can show some similarities with the intended meaning. Within acoustic expressions one can ‘imitate‘ some sounds which are part of a meaning; even more can the pictorial expressions ‘imitate‘ the visual experience of the intended meaning to a high degree, but clearly not every kind of meaning.
DEFINING THE MAIN POINT OF REFERENCE
Because the space of possible problems and visions it nearly infinite large one has to define for a certain process the problem of the actual process together with the vision of a ‘better state of the affairs’. This is realized by a description of he problem in a problem document D_p as well as in a vision statement D_v. Because usually a vision is not without a given context one has to add all the constraints (C) which have to be taken into account for the possible solution. Examples of constraints are ‘non-functional requirements’ (NFRs) like “safety” or “real time” or “without barriers” (for handicapped people). Part of the non-functional requirements are also definitions of win-lose states as part of a game.
AAI ANALYSIS – BASIC PROCEDURE
If the AAI check has been successful and there is at least one task T to be done in an assumed environment ENV and there are at least one executing actor A_exec in this task as well as an assisting actor A_ass then the AAI analysis can start.
ACTOR STORY (AS)
The main task is to elaborate a complete description of a process which includes a start state S* and a goal state S+, where the participating executive actors A_exec can reach the goal state S+ by doing some actions. While the imagined process p_v is a virtual (= cognitive/ mental) model of an intended real process p_e, this intended virtual model p_e can only be communicated by a symbolic expressions L embedded in a meaning relation. Thus the elaboration/ construction of the intended process will be realized by using appropriate expressions L embedded in a meaning relation. This can be understood as a basic mapping of sensor based perceptions of the supposed real world into some abstract virtual structures automatically (unconsciously) computed by the brain. A special kind of this mapping is the case of measurement.
In this text especially three types of symbolic expressions L will be used: (i) pictorial expressions L_pict, (ii) textual expressions of a natural language L_txt, and (iii) textual expressions of a mathematical language L_math. The meaning part of these symbolic expressions as well as the expressions itself will be called here an actor story (AS) with the different modes pictorial AS (PAS), textual AS (TAS), as well as mathematical AS (MAS).
The basic elements of an actor story (AS) are states which represent sets of facts. A fact is an expression of some defined language L which can be decided as being true in a real situation or not (the past and the future are special cases for such truth clarifications). Facts can be identified as actors which can act by their own. The transformation from one state to a follow up state has to be described with sets of change rules. The combination of states and change rules defines mathematically a directedgraph (G).
Based on such a graph it is possible to derive an automaton (A) which can be used as a simulator. A simulator allows simulations. A concrete simulation takes a start state S0 as the actual state S* and computes with the aid of the change rules one follow up state S1. This follow up state becomes then the new actual state S*. Thus the simulation constitutes a continuous process which generally can be infinite. To make the simulation finite one has to define some stop criteria (C*). A simulation can be passive without any interruption or interactive. The interactive mode allows different external actors to select certain real values for the available variables of the actual state.
If in the problem definition certain win-lose states have been defined then one can turn an interactive simulation into a game where the external actors can try to manipulate the process in a way as to reach one of the defined win-states. As soon as someone (which can be a team) has reached a win-state the responsible actor (or team) has won. Such games can be repeated to allow accumulation of wins(or loses).
Gaming allows a far better experience of the advantages or disadvantages of some actor story as a rather lose simulation. Therefore the probability to detect aspects of an actor story with their given constraints is by gaming quite high and increases the probability to improve the whole concept.
Based on an actor story with a simulator it is possible to increase the cognitive power of exploring the future even more. There exists the possibility to define an oracle algorithm as well as different kinds of intelligent algorithms to support the human actor further. This has to be described in other posts.
TAR AND AAR
If the actor story is completed (in a certain version v_i) then one can extract from the story the input-output profiles of every participating actor. This list represents the task-induced actor requirements (TAR). If one is looking for concrete real persons for doing the job of an executing actor the TAR can be used as a benchmark for assessing candidates for this job. The profiles of the real persons are called here actor-actor induced requirements (AAR), that is the real profile compared with the ideal profile of the TAR. If the ‘distance’ between AAR and TAR is below some threshold then the candidate has either to be rejected or one can offer some training to improve his AAR; the other option is to change the conditions of the TAR in a way that the TAR is more closer to the AARs.
The TAR is valid for the executive actors as well as for the assisting actors A_ass.
CONSTRAINTS CHECK
If the actor story has in some version V_i a certain completion one has to check whether the different constraints which accompany the vision document are satisfied through the story: AS_vi |- C.
Such an evaluation is only possible if the constraints can be interpreted with regard to the actor story AS in version vi in a way, that the constraints can be decided.
For many constraints it can happen that the constraints can not or not completely be decided on the level of the actor story but only in a laterphase of the systems engineering process, when the actor story will be implemented in software and hardware.
MEASURING OF USABILITY
Using the actor story as a benchmark one can test the quality of the usability of the whole process by doing usability tests.
This is a continuation from the post about QL Basics Concepts Part 1. The general topic here is the analysis of properties of human behavior, actually narrowed down to the statistical properties. From the different possible theories applicable to statistical properties of behavior here the one called CPT (classical probability theory) is selected for a short examination.
SUMMARY
An analysis of the classical probability theory shows that the empirical application of this theory is limited to static sets of events and probabilities. In the case of biological systems which are adaptive with regard to structure and cognition this does not work. This yields the question whether a quantum probability theory approach does work or not.
THE CPT IDEA
Before we are looking to the case of quantum probability theory (QLPT) let us examine the case of a classical probability theory (CPT) a little bit more.
Generally one has to distinguish the symbolic formal representation of a theory T and some domain of application D distinct from the symbolic representation.
In principle the domain of application D can be nearly anything, very often again another symbolic representation. But in the case of empirical applications we assume usually some subset of ’empirical events’ E of the ’empirical (real) world’ W.
For the following let us assume (for a while) that this is the case, that D is a subset of the empirical world W.
Talking about ‘events in an empirical real world’ presupposes that there there exists a ‘procedure of measurement‘ using a ‘previously defined standard object‘ and a ‘symbolic representation of the measurement results‘.
Furthermore one has to assume a community of ‘observers‘ which have minimal capabilities to ‘observe’, which implies ‘distinctions between different results’, some ‘ordering of successions (before – after)’, to ‘attach symbols according to some rules’ to measurement results, to ‘translate measurement results’ into more abstract concepts and relations.
Thus to speak about empirical results assumes a set of symbolic representations of those events as a finite set of symbolic representations which represent a ‘state in the real world’ which can have a ‘predecessor state before’ and – possibly — a ‘successor state after’ the ‘actual’ state. The ‘quality’ of these measurement representations depends from the quality of the measurement procedure as well as from the quality of the cognitive capabilities of the participating observers.
In the classical probability theory T_cpt as described by Kolmogorov (1932) it is assumed that there is a set E of ‘elementary events’. The set E is assumed to be ‘complete’ with regard to all possible events. The probability P is coming into play with a mapping from E into the set of positive real numbers R+ written as P: E —> R+ or P(E) = 1 with the assumption that all the individual elements e_i of E have an individual probability P(e_i) which obey the rule P(e_1) + P(e_2) + … + P(e_n) = 1.
In the formal theory T_cpt it is not explained ‘how’ the probabilities are realized in the concrete case. In the ‘real world’ we have to identify some ‘generators of events’ G, otherwise we do not know whether an event e belongs to a ‘set of probability events’.
Kolmogorov (1932) speaks about a necessary generator as a ‘set of conditions’ which ‘allows of any number of repetitions’, and ‘a set of events can take place as a result of the establishment of the condition’. (cf. p.3) And he mentions explicitly the case that different variants of the a priori assumed possible events can take place as a set A. And then he speaks of this set A also of an event which has taken place! (cf. p.4)
If one looks to the case of the ‘set A’ then one has to clarify that this ‘set A’ is not an ordinary set of set theory, because in a set every member occurs only once. Instead ‘A’ represents a ‘sequence of events out of the basic set E’. A sequence is in set theory an ‘ordered set’, where some set (e.g. E) is mapped into an initial segment of the natural numbers Nat and in this case the set A contains ‘pairs from E x Nat|\n’ with a restriction of the set Nat to some n. The ‘range’ of the set A has then ‘distinguished elements’ whereby the ‘domain’ can have ‘same elements’. Kolmogorov addresses this problem with the remark, that the set A can be ‘defined in any way’. (cf. p.4) Thus to assume the set A as a set of pairs from the Cartesian product E x Nat|\n with the natural numbers taken from the initial segment of the natural numbers is compatible with the remark of Kolmogorov and the empirical situation.
For a possible observer it follows that he must be able to distinguish different states <s1, s2, …, sm> following each other in the real world, and in every state there is an event e_i from the set of a priori possible events E. The observer can ‘count’ the occurrences of a certain event e_i and thus will get after n repetitions for every event e_i a number of occurrences m_i with m_i/n giving the measured empirical probability of the event e_i.
Example 1: Tossing a coin with ‘head (H)’ or ‘tail (T)’ we have theoretically the probabilities ‘1/2’ for each event. A possible outcome could be (with ‘H’ := 0, ‘T’ := 1): <((0,1), (0,2), (0,3), (1,4), (0,5)> . Thus we have m_H = 4, m_T = 1, giving us m_H/n = 4/5 and m_T/n = 1/5. The sum yields m_H/n + m_T/n = 1, but as one can see the individual empirical probabilities are not in accordance with the theory requiring 1/2 for each. Kolmogorov remarks in his text that if the number of repetitions n is large enough then will the values of the empirically measured probability approach the theoretically defined values. In a simple experiment with a random number generator simulating the tossing of the coin I got the numbers m_Head = 4978, m_Tail = 5022, which gives the empirical probabilities m_Head/1000 = 0.4977 and m_Teil/ 1000 = 0.5021.
This example demonstrates while the theoretical term ‘probability’ is a simple number, the empirical counterpart of the theoretical term is either a simple occurrence of a certain event without any meaning as such or an empirically observed sequence of events which can reveal by counting and division a property which can be used as empirical probability of this event generated by a ‘set of conditions’ which allow the observed number of repetitions. Thus we have (i) a ‘generator‘ enabling the events out of E, we have (ii) a ‘measurement‘ giving us a measurement result as part of an observation, (iii) the symbolic encoding of the measurement result, (iv) the ‘counting‘ of the symbolic encoding as ‘occurrence‘ and (v) the counting of the overall repetitions, and (vi) a ‘mathematical division operation‘ to get the empirical probability.
Example 1 demonstrates the case of having one generator (‘tossing a coin’). We know from other examples where people using two or more coins ‘at the same time’! In this case the set of a priori possible events E is occurring ‘n-times in parallel’: E x … x E = E^n. While for every coin only one of the many possible basic events can occur in one state, there can be n-many such events in parallel, giving an assembly of n-many events each out of E. If we keeping the values of E = {‘H’, ‘T’} then we have four different basic configurations each with probability 1/4. If we define more ‘abstract’ events like ‘both the same’ (like ‘0,0’, ‘1,1’) or ‘both different’ (like ‘0,1’. ‘1,0’), then we have new types of complex events with different probabilities, each 1/2. Thus the case of n-many generators in parallel allows new types of complex events.
Following this line of thinking one could consider cases like (E^n)^n or even with repeated applications of the Cartesian product operation. Thus, in the case of (E^n)^n, one can think of different gamblers each having n-many dices in a cup and tossing these n-many dices simultaneously.
Thus we have something like the following structure for an empirical theory of classical probability: CPT(T) iff T=<G,E,X,n,S,P*>, with ‘G’ as the set of generators producing out of E events according to the layout of the set X in a static (deterministic) manner. Here the set E is the set of basic events. The set X is a ‘typified set’ constructed out of the set E with t-many applications of the Cartesian operation starting with E, then E^n1, then (E^n1)^n2, …. . ‘n’ denotes the number of repetitions, which determines the length of a sequence ‘S’. ‘P*’ represents the ’empirical probability’ which approaches the theoretical probability P while n is becoming ‘big’. P* is realized as a tuple of tuples according to the layout of the set X where each element in the range of a tuple represents the ‘number of occurrences’ of a certain event out of X.
Example: If there is a set E = {0,1} with the layout X=(E^2)^2 then we have two groups with two generators each: <<G1, G2>,<G3,G4>>. Every generator G_i produces events out of E. In one state i this could look like <<0, 0>,<1,0>>. As part of a sequence S this would look like S = <….,(<<0, 0>,<1,0>>,i), … > telling that in the i-th state of S there is an occurrence of events like shown. The empirical probability function P* has a corresponding layout P* = <<m1, m2>,<m3,m4>> with the m_j as ‘counter’ which are counting the occurrences of the different types of events as m_j =<c_e1, …, c_er>. In the example there are two different types of events occurring {0,1} which requires two counters c_0 and c_1, thus we would have m_j =<c_0, c_1>, which would induce for this example the global counter structure: P* = <<<c_0, c_1>, <c_0, c_1>>,<<c_0, c_1>,<c_0, c_1>>>. If the generators are all the same then the set of basic events E is the same and in theory the theoretical probability function P: E —> R+ would induce the same global values for all generators. But in the empirical case, if the theoretical probability function P is not known, then one has to count and below the ‘magic big n’ the values of the counter of the empirical probability function can be different.
This format of the empirical classical probability theory CPT can handle the case of ‘different generators‘ which produce events out of the same basic set E but with different probabilities, which can be counted by the empirical probability function P*. A prominent case of different probabilities with the same set of events is the case of manipulations of generators (a coin, a dice, a roulette wheel, …) to deceive other people.
In the examples mentioned so far the probabilities of the basic events as well as the complex events can be different in different generators, but are nevertheless ‘static’, not changing. Looking to generators like ‘tossing a coin’, ‘tossing a dice’ this seams to be sound. But what if we look to other types of generators like ‘biological systems’ which have to ‘decide’ which possible options of acting they ‘choose’? If the set of possible actions A is static, then the probability of selecting one action a out of A will usually depend from some ‘inner states’ IS of the biological system. These inner states IS need at least the following two components:(i) an internal ‘representation of the possible actions’ IS_A as well (ii) a finite set of ‘preferences’ IS_Pref. Depending from the preferences the biological system will select an action IS_a out of IS_A and then it can generate an action a out of A.
If biological systems as generators have a ‘static’ (‘deterministic’) set of preferences IS_Pref, then they will act like fixed generators for ‘tossing a coin’, ‘tossing a dice’. In this case nothing will change. But, as we know from the empirical world, biological systems are in general ‘adaptive’ systems which enables two kinds of adaptation: (i) ‘structural‘ adaptation like in biological evolution and (ii) ‘cognitive‘ adaptation as with higher organisms having a neural system with a brain. In these systems (example: homo sapiens) the set of preferences IS_Pref can change in time as well as the internal ‘representation of the possible actions’ IS_A. These changes cause a shift in the probabilities of the events manifested in the realized actions!
If we allow possible changes in the terms ‘G’ and ‘E’ to ‘G+’ and ‘E+’ then we have no longer a ‘classical’ probability theory CPT. This new type of probability theory we can call ‘non-classic’ probability theory NCPT. A short notation could be: NCPT(T) iff T=<G+,E+,X,n,S,P*> where ‘G+’ represents an adaptive biological system with changing representations for possible Actions A* as well as changing preferences IS_Pref+. The interesting question is, whether a quantum logic approach QLPT is a possible realization of such a non-classical probability theory. While it is known that the QLPT works for physical matters, it is an open question whether it works for biological systems too.
REMARK: switching from static generators to adaptive generators induces the need for the inclusion of the environment of the adaptive generators. ‘Adaptation’ is generally a capacity to deal better with non-static environments.